RT-2 (1)
- https://hjfy.top/arxiv/2307.15818 和 OpenVLA 同属一派,将 VLM 的最后 256 个 token id 分配给动作,直接将 x, y, z, yaw, pitch, roll, gripper 划分为 256 个离散桶,七个动作维度共享 token id 并通过位置区分语义,直接拼接丢给 VLM 输出隐状态,一个 head 解码出 id 再映射回动作空间. 缺点是离散化和自回归导致的精度不够.
RT-1 输出的同样为离散词表,只不过是从零开始训练小型 transformer.
TODO: 数据集这一块儿有空可以再看看.
World Model for Robot Learning: A Comprehensive Survey (2)
Fast-WAM (Yuanet al., 2026) (3)
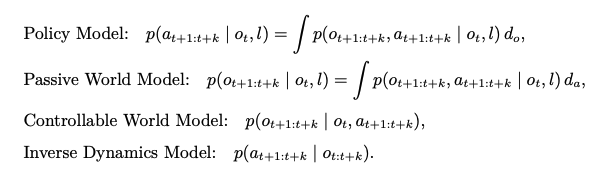
可被视为该家族中的一个混合点:它采用具有共享注意力的 Transformer 混合体骨干网络 及耦合的视频与动作分支,但结论认为主要优势可能更多来自训练期间的视频协同训练,而非推理阶段 的显式未来想象。在这些变体中,视频分支越来越不再被视为需要忠实渲染的输出,而是被看作一种预 测性潜在过程,其隐状态用于指导动作生成. (by 综述)
不论在 train-time 还是 infer-time, noisy action 都只会 attend 第一帧视频的 kv. infer-time 只需要把 clean obs_image 丢进 dit 前向跑一次生成 kv 给 action 用.
可以解释为,train-time 联合训练多帧视频和动作生成的好处是逼着 video z_0 编码能够“从当前画面推导出未来变化”的信息。Fast-wam 没有历史信息.
video loss: 让 z0 表征更懂未来/动力学
action loss: 让 action expert 学会从这个 z0 表征里采样动作
所谓双 DiT,其实就是 MoT,即 video DiT 和 action DiT 在每个 transformer layer 通过 self-attention 双向注意.
flowchart TD
video["Training Video
(B, 3, T=33, H=224, W=448)"] --> vae["Wan VAE Encode"]
vae --> z0["Video Latents z_0
(B, 48, T_lat=9, 28, 56)"]
z0 --> zv["Add Flow Noise
sample t_v, eps_v"]
zv --> vpre["Video Expert pre_dit
patchify + 3D RoPE"]
prompt["Task Prompt / Cached Text
(B, L=128, D=4096)"] --> ctx["Text Context"]
state["Robot State
(B, T, D_state=8)"] --> prop["proprio_encoder(Linear)
as 1 state token"]
prop --> ctx
ctx --> vpre
action["GT Actions a_0
(B, T_act=32, A=7)"] --> za["Add Flow Noise
sample t_a, eps_a"]
za --> apre["Action Expert pre_dit
Linear(A -> 1024) + 1D RoPE"]
ctx --> apre
vpre --> vt["Video Tokens
(B, S_v=3528, D_v=3072)"]
apre --> at["Action Tokens
(B, 32, D_a=1024)"]
vt --> mot["MoT Mixed Transformer
30 layers shared masked self-attn"]
at --> mot
mask["Mask
video->video causal
action->first-frame video + action"] --> mot
mot --> vpost["Video post_dit
unpatchify"]
mot --> apost["Action post_dit
Linear(1024 -> A)"]
vpost --> pv["Predicted video velocity
(B, 48, T_lat', 28, 56)"]
apost --> pa["Predicted action velocity
(B, 32, 7)"]
zv --> vtgt["Target video velocity"]
za --> atgt["Target action velocity"]
pv --> vloss["Video FM Loss"]
vtgt --> vloss
pa --> aloss["Action FM Loss"]
atgt --> aloss
vloss --> total["Total Loss
lambda_v * L_video + lambda_a * L_action"]
aloss --> total
Lingbot-va (4)
- https://hjfy.top/arxiv/2601.21998 Lin Li, Yinghao Xu
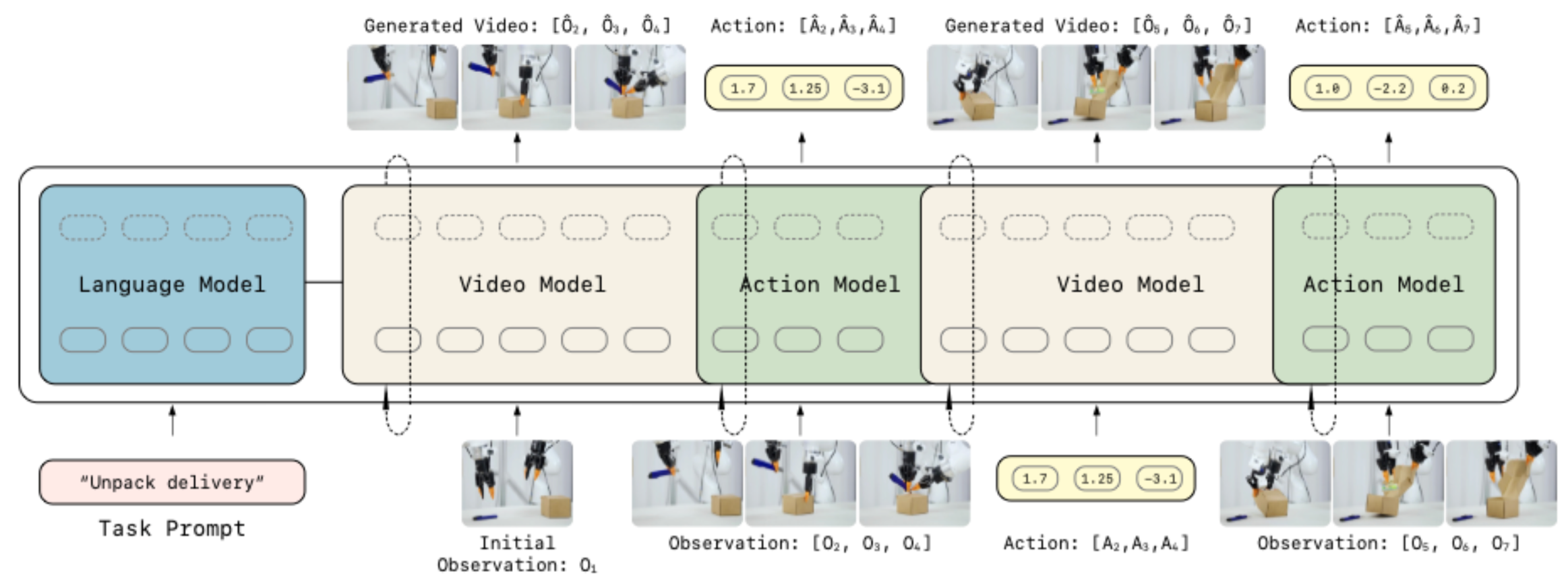
lingbot-va 的自回归扩散方法为:video/action diffusion 后对 clean token 计算 kv 存入 kv cache,此后 DiT 每一层将会 attend 之前的 kv. 而 diffusion 顺序为 video 2 帧 -> action 2x16 帧(这部分相当于 IDM) -> video 2 帧 -> action 2x16 帧,所有动作均会执行.
默认实现为 shared backbone,通过 action_mode 分支区分 video input 和 action input,它会选择不同的 input embedder, time embedder 和 output head. KV cache 使用 ring buffer 维护,容量约 9792 tokens.
1obs0 -> VAE -> z02
3infer #1 (frame_st_id=0):41) flow denoise video chunk [z0_anchor, z1_hat] # 2帧5 - 第0帧 init_latent=z06 - 第1帧才是预测的未来 latent72) flow denoise action chunk [a_grp0(16步), a_grp1(16步)] # 1 action chunk = 2 group(对齐 2 video frame) = 32 steps8 - 条件:cache(空) + 刚预测的 video chunk9
10execute #1(第一轮特殊):11 start_idx=1 -> 跳过 a_grp0,只执行 a_grp1 的 16 步12 每 4 步收一次 obs -> key_frame_list(约 4 个真实 obs)13
14compute_kv_cache #1:15 clear_pred_cache() # 删掉 z_hat、a_hat,不是“替换某几帧”18 collapsed lines
16 real_z = VAE(key_frame_list)17 若 frame_st_id==0: cat(init_latent=z0, real_z)18 real_a = preprocess(executed action chunk)19 写入 cache(is_pred=False)20
21---22
23infer #2:24 预测下一个 chunk [z2_hat, z3_hat] + [a_grp2, a_grp3]25 条件:cache 里的 real history26
27execute #2 起:28 start_idx=0 -> 执行所有 32 步 action29 每 4 步收 obs -> key_frame_list(约 8 个)30
31compute_kv_cache #2:32 再次 clear_pred_cache()33 追加新的 real_z / real_a(real_a != pred_a)Infer-time denoise video
flowchart TD
cache["模块外 KV Cache
来自 compute_kv_cache #1
real history only: z/a KV
capacity per block: [B_eff=2, 9792, 24, 128]
这里 eff=2 是 CFG 用的"] -.-> attn
noise_z["sample video noise
latents: [1, 48, 2, 24, 20]
表示 [z2_hat, z3_hat]"] --> prep["CFG repeat + grid/timestep
[B_eff=2, 48, 2, 24, 20]"]
prep --> vemb[["patch_embedding_mlp
192 -> 3072"]]
vemb --> vt["video tokens
seq_len = 2 * 12 * 10 = 240
[B_eff=2, 240, 3072]"]
prompt["cached prompt_embeds
[B_eff=2, 512, 4096]"] --> textproj[["text_embedder
4096 -> 3072"]]
textproj --> txt["text tokens
[B_eff=2, 512, 3072]"]
vt --> attn[["Shared WanTransformerBlock x30
self-attn 读模块外 KV Cache
cross-attn 读 text tokens"]]
txt --> attn
attn --> vhead[["norm_out + proj_out"]]
vhead --> vvel["video velocity
tokens [B_eff=2, 240, 192]
unpatch -> [B_eff=2, 48, 2, 24, 20]"]
vvel --> sched["Flow scheduler step
更新 [z2_hat, z3_hat]"]
sched --> predcache["最后一步 update_cache=1
把 predicted video KV 写入 cache
is_pred=True"]
Denoise action
flowchart TD
cache["模块外 KV Cache
real history + 刚写入的 predicted video chunk KV
z/a history + [z2_hat,z3_hat]"] -.-> attn
noise_a["sample action noise
actions: [1, 30, 2, 16, 1]
表示 [a_grp2, a_grp3]"] --> prep["CFG repeat + grid/timestep
[B_eff=2, 30, 2, 16, 1]"]
prep --> aemb[["action_embedder
30 -> 3072"]]
aemb --> at["action tokens
seq_len = 2 * 16 = 32
[B_eff=2, 32, 3072]"]
prompt["cached prompt_embeds
[B_eff=2, 512, 4096]"] --> textproj[["text_embedder
4096 -> 3072"]]
textproj --> txt["text tokens
[B_eff=2, 512, 3072]"]
at --> attn[["Shared WanTransformerBlock x30
self-attn 读模块外 KV Cache
cross-attn 读 text tokens"]]
txt --> attn
attn --> ahead[["norm_out + action_proj_out"]]
ahead --> avel["action velocity
[B_eff=2, 32, 30]
reshape -> [B_eff=2, 30, 2, 16, 1]"]
avel --> sched["Flow scheduler step
更新 [a_grp2, a_grp3]"]
sched --> predcache["最后一步 update_cache=1
把 predicted action KV 写入 cache
is_pred=True"]
RTC (5)
- https://arxiv.org/abs/2506.07339 | Kevin Black, Sergey
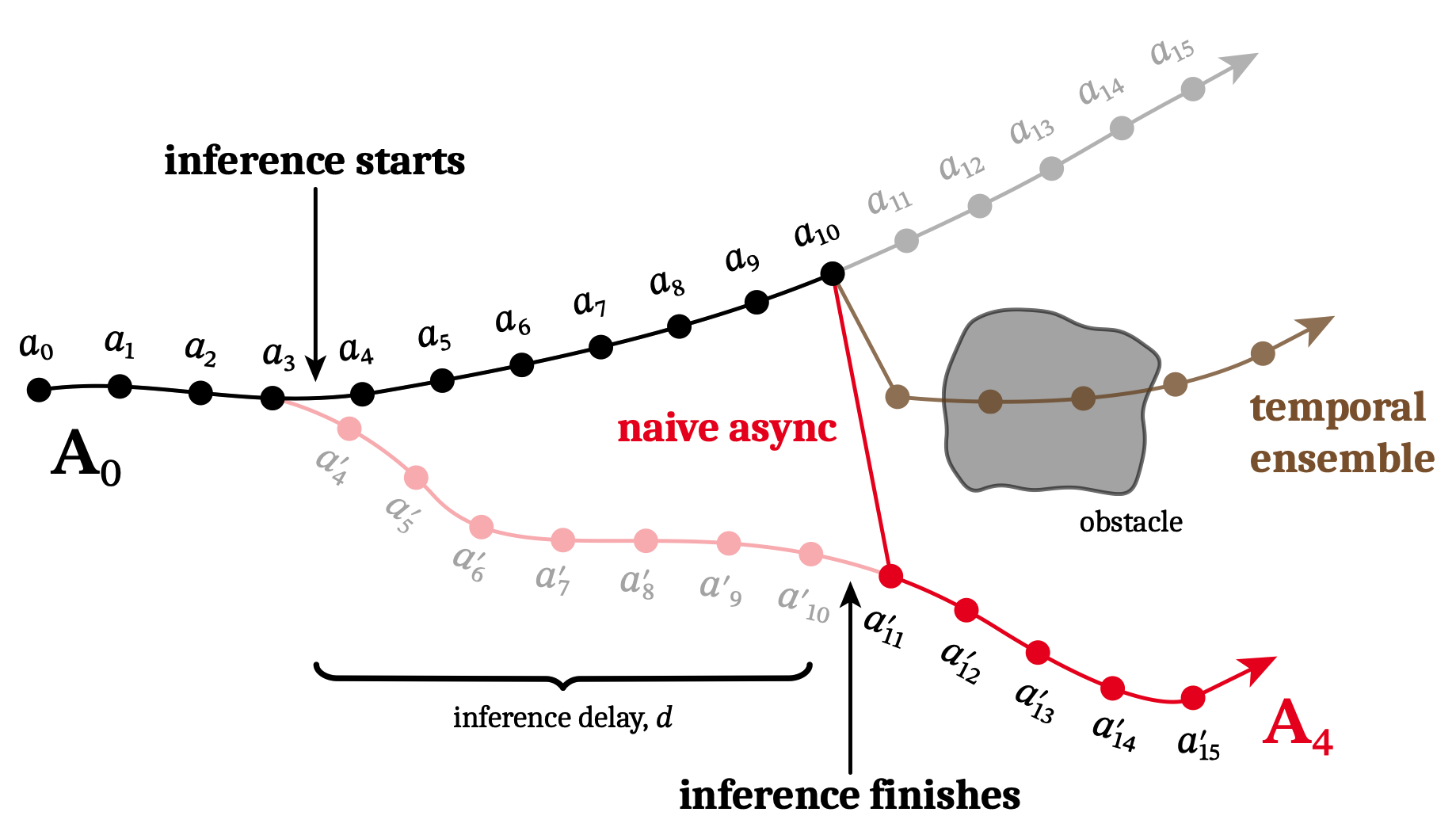
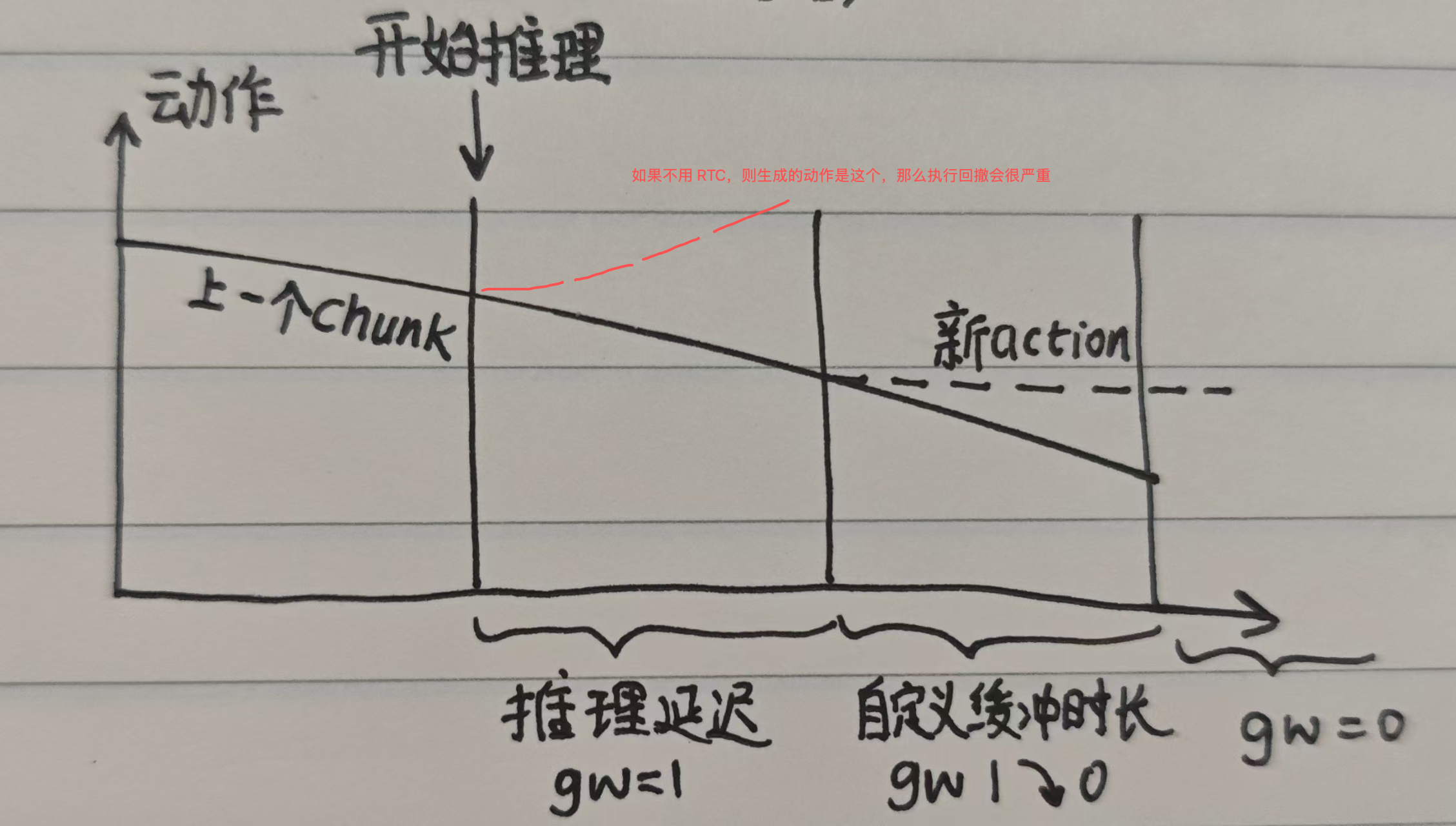
考虑上面图的问题:前后两个 chunk 重合处不能完美一致,所以 naive async 几乎必然会抖动. 从图中 a11 开始插值(平滑地增加权重)是一个可行方案,但是这会导致插值段之后和之前缺乏关联. RTC 同样从 a11 开始使用平滑权重,只不过直接 guidance 原本的 action expert FM 过程:
1# 符号:H: (Prediction Horizon), M: 动作维度 (Action Dim), O: 观测维度2def rtc_inference(v_net, o_t, A_prev, d, s, n=5, beta=5):3 """4 变量:o_t: 观测 [O], A_prev: 旧动作块的残余部分 [H, M] (已 pad0 至H长度)5 d: 推理延迟 s: 执行步长 n: 迭代步数 beta: 引导项裁剪值6 """7
8 A_tau = torch.randn((H, M)) # [H, M] 采样初始噪声9 W = compute_soft_mask(d, s, H) # [H, 1] 软掩码权重,1 ~ 0递减10 for tau in np.linspace(0, 1, n):11 v = v_net(A_tau, o_t, tau) # [H, M] 当前速度场预测12 A_hat_1 = A_tau + (1 - tau) * v # [H, M] 无 guidance 情况下的最终动作13 loss = 0.5 * (W * (A_prev - A_hat_1)**2).sum() # 标量14 g = torch.autograd.grad(loss, A_tau)[0] # [H, M] 获取修正梯度,指引 A_tau 向 A_prev 靠拢15 scale = min(beta, get_weight_scale(tau)) # get_weight_scale 是一个随 tau 递减的权重2 collapsed lines
16 A_tau += (1/n) * (v + scale * g) # [H, M] 结合原始预测与裁剪后的引导项进行更新17 return A_tau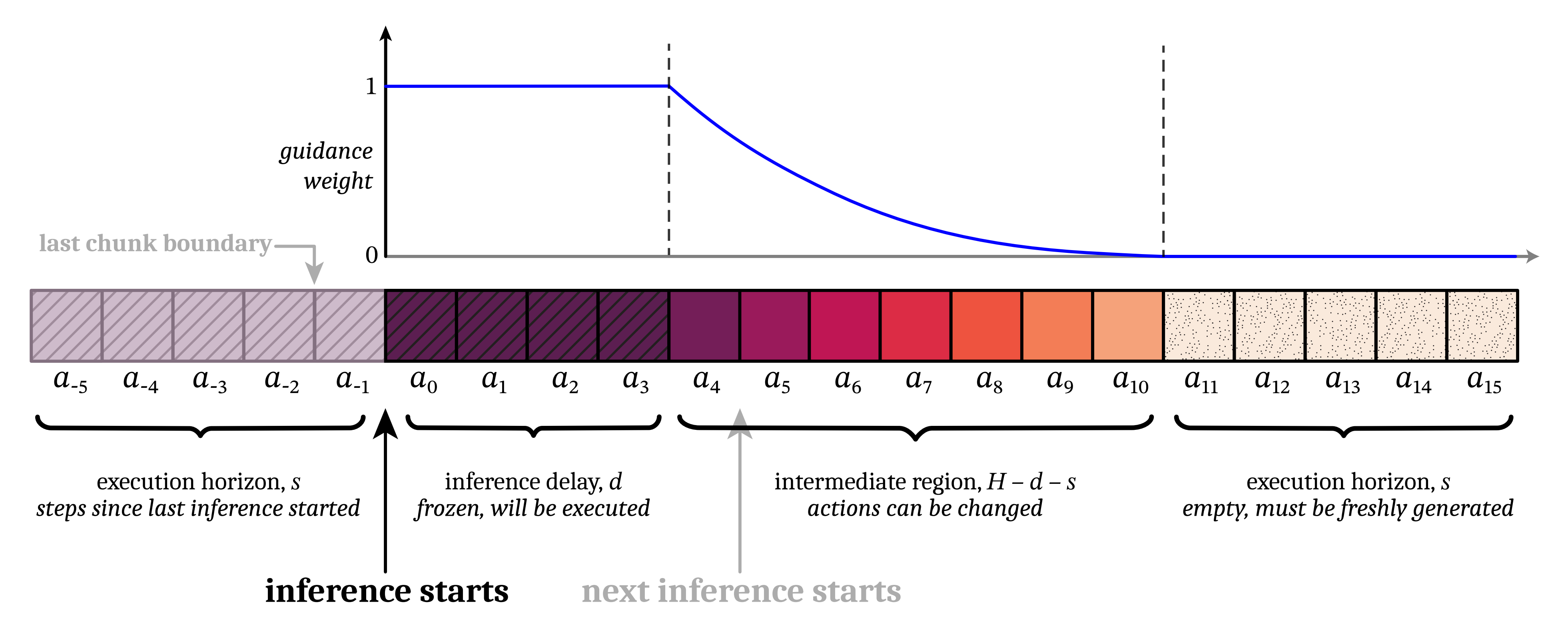
随后提出了 Train-time RTC https://hjfy.top/arxiv/2512.05964 。既然开始推理时刻需要基于上一个 chunk 的后缀进行 autograd inpainting,干脆直接在训练时让模型以上一个 chunk 的后缀(直接用 clean GT action)作为条件直接去噪,从而大幅节省 infer-time autograd 开销。由于不知道 infer-time 的真实 delay,训练时采用 randomly sampled delay.
Pi0.6 & Pi0.5 & Pi0 (6,7,8)
Pi0 除了以下设计,还引入了 zero-padding 进行跨本体混合训练,即状态和动作向量长度设定为数据集中最大自由度,不足补 0. 模型只能通过输入的本体感知 (例如 is_pad 信息?)和语言指令来识别当前的硬件构型. Pi0 并不能 zero-shot,但预训练能够帮助后训练的性能提升. 其他博主的一些理解:
Pi0 分离 actor 和 VLM,是为了避免后训练中对 VLM 能力的灾难性破坏.
Pi0 一次性引入了多个在后续被广泛使用的 Setting,当然,这些内容一开始的出处在这里不作考证,包括使用 MoT 进行 LLM 以及 Actor 的交互(见 Bagel ↗︎),使用 Flow Matching Loss 训练 Actor 以及使用 zero-padding 来进行跨本地的混合训练。
flowchart TD
img["Images
(B, n_cam=3, H=224, W=224, C=3)"] --> siglip["PaliGemma Image Encoder(SigLIP)"]
txt["Text Tokens
(B, max_token_len=48)"] --> tok["Gemma Token Embedding"]
siglip --> vis["Visual Tokens
(B, 3*256=768, D=2048)"]
tok --> textemb["Text Embeddings
(B, 48, D=2048)"]
vis --> prefix["Prefix Tokens
(B, seq_len=816, D=2048)"]
textemb --> prefix
state["Robot State
(B, action_dim=32)"] --> stateproj["state_proj"]
noisy["Noisy Actions x_t
(B, horizon=50, action_dim=32)"] --> actproj["action_in_proj"]
time["Flow Time t
(B,)"] --> timemlp["Time Embedding MLP"]
stateproj --> statetok["State Token
(B, 1, D=1024)"]
actproj --> acttok["Action Tokens
(B, 50, D=1024)"]
timemlp --> timetok["Time Tokens
(B, 50, D=1024)"]
acttok --> mix["Action + Time Tokens
(B, 50, D=1024)"]
timetok --> mix
statetok --> suffix["Suffix Tokens
(B, seq_len=51, D=1024)"]
mix --> suffix
prefix --> pg["PaliGemma / Gemma 2B Expert"]
suffix --> ae["Action Expert / Gemma 300M"]
pg <--> shared["Shared Masked Self-Attn (qkv dim=256)"]
ae <--> shared
shared --> actout["action_out_proj"]
actout --> vt["Predicted v_t
(B, 50, action_dim=32)"]
gt["Target u_t = noise - action
(B, 50, action_dim=32)"] --> loss["Flow Matching Loss"]
vt --> loss
其中一个 layer 的伪代码:
1obs = norm_obs(obs0) # (B, Lo, 2048)2act = norm_act(act0) # (B, La, 1024)3q_obs = Wq_obs(obs).view(B, Lo, 8, 256).transpose(1, 2) # (B, 8, Lo, 256)4k_obs = Wk_obs(obs).view(B, Lo, 1, 256).transpose(1, 2) # (B, 1, Lo, 256)5v_obs = Wv_obs(obs).view(B, Lo, 1, 256).transpose(1, 2) # (B, 1, Lo, 256)6q_act = Wq_act(act).view(B, La, 8, 256).transpose(1, 2) # (B, 8, La, 256)7k_act = Wk_act(act).view(B, La, 1, 256).transpose(1, 2) # (B, 1, La, 256)8v_act = Wv_act(act).view(B, La, 1, 256).transpose(1, 2) # (B, 1, La, 256), Wv_act(act) is (B, La, 256)9
10q = cat([q_obs, q_act], dim=2) # (B, 8, Lo+La, 256)11k = repeat_kv(cat([k_obs, k_act], dim=2), n_rep=8) # (B, 8, Lo+La, 256)12v = repeat_kv(cat([v_obs, v_act], dim=2), n_rep=8) # (B, 8, Lo+La, 256)13
14y = softmax(q @ k.transpose(-2, -1)) @ v # (B, 8, Lo+La, 256)15y = y.transpose(1, 2).reshape(B, Lo+La, 2048) # (B, Lo+La, 2048)5 collapsed lines
16
17obs_y = Wo_obs(y[:, :Lo]) # (B, Lo, 2048)18act_y = Wo_act(y[:, Lo:]) # (B, La, 1024)19obs1 = gated_residual(obs0, obs_y) # (B, Lo, 2048)20act1 = gated_residual(act0, act_y) # (B, La, 1024)Pi0.5
https://arxiv.org/abs/2504.16054
一句话:对 state 进行 bin 离散并以文本丢进 VLM,预训练则对 action 使用 FAST[1] 分词器离散从而在不启用 action expert 的情况下进行 LLM-like NTP 预测并使用交叉熵 loss. 目的是大幅加快训练,而 infer-time 用 flow matching 反而更快。然而,对于跨本体 state 似乎没有做特殊处理,而都是归一化,可能需要通过语言指令来识别本体。
架构新技巧:
- pi0.5 flow time t 使用 adaRMSNorm[2] 用作 action flow condition. (pi0 是 MLP 直接为 token , concat action token)
- pi0.5 将 state 离散化为 task prompt(在 pi0 中,state 是过 linear 进 action expert)
- FAST tokenizer 就是先将整个 action chunk (原文说了是 compressing the action chunks) 先 encode 为 8 个 latent 然后 vector quantize 就完事. 最终将 50x19 action 转为 8 个 token.
- adarmsnorm:
1# 1. 提取时间步 t 的正弦位置编码2# t: (b,)3# time_emb: (b, emb=2048)4time_emb = SinusoidalEmbedding(t, dim=2048)5# 2. 通过两层带 Swish 激活的 MLP 投影得到条件向量6# adarms_cond: (b, emb=2048)7adarms_cond = Swish(Linear(Swish(Linear(time_emb))))8# --- 以下发生在 Action Expert (Gemma-300m) 的每一层 Transformer Block 中 ---9# 3. 在 Action Expert 的每一层,将条件向量映射为缩放 (scale) 和平移 (shift) 参数10# scale, shift 形状均为 (b, emb=2048)11# 注意:由于 action_tokens 形状是 (b, ah=50, emb=2048),这里会将 scale/shift 广播 (broadcast) 到序列长度维度12scale, shift = Linear(adarms_cond, out_features=2048 * 2).chunk(2, dim=-1)13# 4. 对隐藏层 x 应用 RMSNorm 后,注入时间信息14# x: (b, ah=50, emb=2048)15# x_out: (b, ah=50, emb=2048)1 collapsed line16x_out = RMSNorm(x) * (1 + scale.unsqueeze(1)) + shift.unsqueeze(1)
flowchart TD
img["Images
(B, n_cam=3, H=224, W=224, C=3)"] --> siglip["PaliGemma Image Encoder(SigLIP)"]
prompt["Task Prompt
(string)"] --> format["Prompt Format
Task: ..., State: ...;
Action:"]
rawstate["Raw / Normalized Robot State
(B, action_dim=32)"] --> binstate["Digitize State
256 bins over [-1, 1]"]
binstate --> statestr["State String
(e.g. '12 98 ...')"]
statestr --> format
format --> txt["Text + Discrete State Tokens
(B, max_token_len=200)"]
txt --> tok["Gemma Token Embedding"]
siglip --> vis["Visual Tokens
(B, 3*256=768, D=2048)"]
tok --> textemb["Text/State Embeddings
(B, 200, D=2048)"]
vis --> prefix["Prefix Tokens
(B, seq_len=968, D=2048)"]
textemb --> prefix
noisy["Noisy Actions x_t
(B, horizon=50, action_dim=32)"] --> actproj["action_in_proj"]
time["Flow Time t
(B,)"] --> timemlp["Time MLP for adaRMSNorm"]
actproj --> suffix["Suffix Action Tokens
(B, seq_len=50, D=1024)"]
timemlp --> adarms["adaRMSNorm condition
(B, D=1024)"]
prefix --> pg["PaliGemma / Gemma 2B Expert"]
suffix --> ae["Action Expert / Gemma 300M"]
adarms --> ae
pg <--> shared["Shared Masked Self-Attn
(qkv head_dim=256)"]
ae <--> shared
shared --> actout["action_out_proj"]
actout --> vt["Predicted v_t
(B, 50, action_dim=32)"]
gt["Target u_t = noise - action
(B, 50, action_dim=32)"] --> loss["Flow Matching Loss"]
vt --> loss
pi0.6
flowchart TD
img["Images
(B, n_cam=3, H=224, W=224, C=3)"] --> siglip["Image Encoder
SigLIP 400M"]
txt["Text + Discrete State Tokens
(B, max_token_len=200)"] --> tok["Gemma Token Embedding"]
siglip --> vis["Visual Tokens
(B, n_cam*256, D_vlm)"]
tok --> textemb["Text/State Embeddings
(B, 200, D_vlm)"]
vis --> prefix["Prefix Tokens
(image + text + state + metadata)"]
textemb --> prefix
noisy["Noisy Actions a_eta
(B, horizon=50, action_dim=32)"] --> actproj["action_in_proj"]
time["Flow Time eta
(B,)"] --> timemlp["Time MLP for adaRMSNorm"]
actproj --> suffix["Suffix Action Tokens
(B, seq_len=50, D_ae)"]
timemlp --> adarms["adaRMSNorm condition
(B, D_ae)"]
prefix --> pg["pi*0.6 VLA Backbone
Gemma 3 4B"]
suffix --> ae["Action Expert
860M"]
adarms --> ae
pg <--> shared["Shared Masked Self-Attn
(qkv head_dim=256)"]
ae <--> shared
shared --> actout["action_out_proj"]
actout --> vt["Predicted Flow f_theta
(B, 50, action_dim=32)"]
gt["GT Action Chunk a
(B, 50, action_dim=32)"] --> ftarget["Target omega - a
(B, 50, action_dim=32)"]
noise["Noise omega ~ N(0,I)
(B, 50, action_dim=32)"] --> noisy
noise --> ftarget
ftarget --> floss["Flow Matching Loss
alpha_eta * ||f_theta - (omega - a)||^2"]
vt --> floss
img --> vfsiglip["Value Image Encoder
SigLIP 400M"]
txt --> vftok["Value Text Embedding"]
vfsiglip --> vfprefix["Value Prefix Tokens"]
vftok --> vfprefix
vfprefix --> vf["Value Function
Gemma 270M + value head"]
vf --> vdist["Value Distribution
p_phi(V | o_t, l), 201 bins"]
returns["MC Return R_t
from success/failure episode reward"] --> vloss["Value CE Loss
CE(p_phi, discretized R_t)"]
vdist --> vloss
vdist --> vscalar["Scalar Value V(o)
E over value bins"]
vscalar --> adv["Advantage A(o,a)
r_t:t+N + V(o_t+N) - V(o_t)"]
adv --> bin["Binarize
I_t = 1[A > epsilon_l]"]
bin --> advtxt["Advantage Text Token
'positive' / 'negative'"]
advtxt --> tok
pg --> subtask["Subtask Text Tokens
(e.g. 'tamp the coffee')"]
pg --> fastout["FAST Discrete Action Tokens
a^l_t:t+H"]
gt --> fasttok["FAST Tokenizer"]
fasttok --> fastgt["GT FAST Action Tokens"]
subtask --> tokce["Next-token CE/NLL
subtask + FAST action tokens"]
fastout --> tokce
fastgt --> tokce
classDef pi06 fill:#fff2b3,stroke:#d6a600,stroke-width:2px,color:#111;
class pg,ae,vfsiglip,vftok,vfprefix,vf,vdist,vscalar,adv,bin,advtxt,fastout,fasttok,fastgt,tokce pi06;
总结
VLA 架构的大方向:
- [VLM] -> embedding -> [MLP(i.e. action head)] -> action
- [VLM] -> embedding -> kv -> [Decoder transformer, attended by learnable q pos embedding] -> [action head] -> action (ACT-like)
- [VLM] -> MoT <-> [action expert] -> [action head] -> action (Pi-like)