-
之前的算法基于价值,没有显式策略(策略就是选最大动作价值的动作)。下述 REINFORCE 方法基于策略.
-
设 是策略,处处可微,要学习的参数为
-
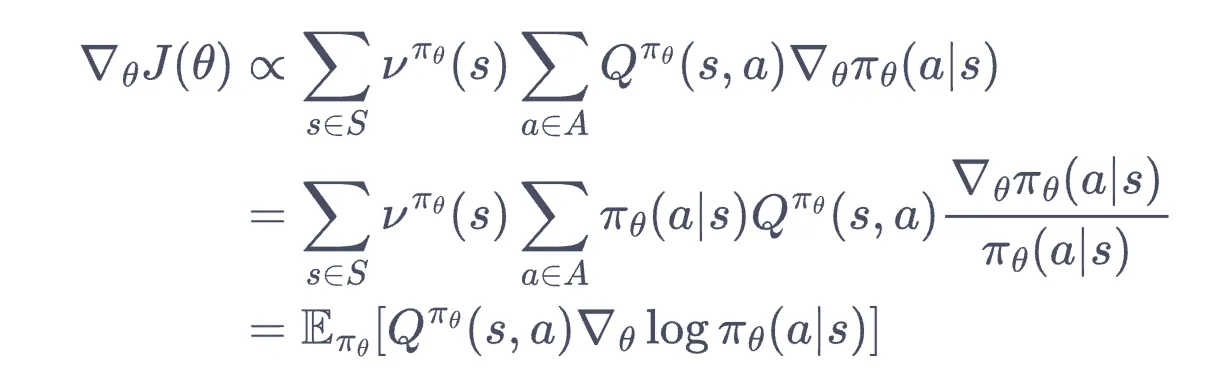
目标是最大化 :
-
设状态访问分布为 (无穷步状态概率加权向量,见第三章),有:
- 提示:
-
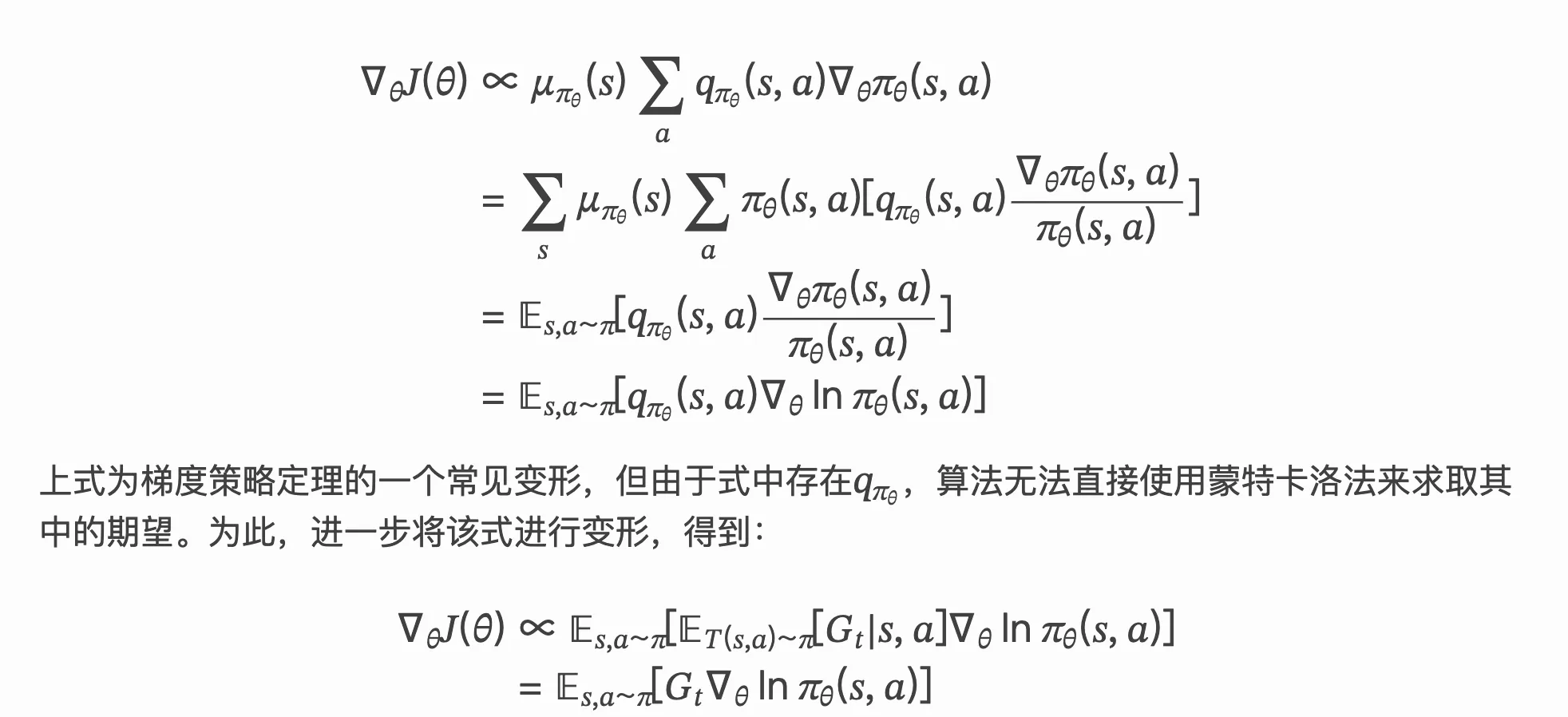
另一证明:
- https://paddlepedia.readthedocs.io/en/latest/tutorials/reinforcement_learning/policy_gradient.html
- 此图第一行少写了一个
- 这里 是执行 后转移到 的概率.
蒙特卡洛 REINFORCE
-
考虑用蒙特卡洛方法估计,对有限步的环境来说,依据上式有:
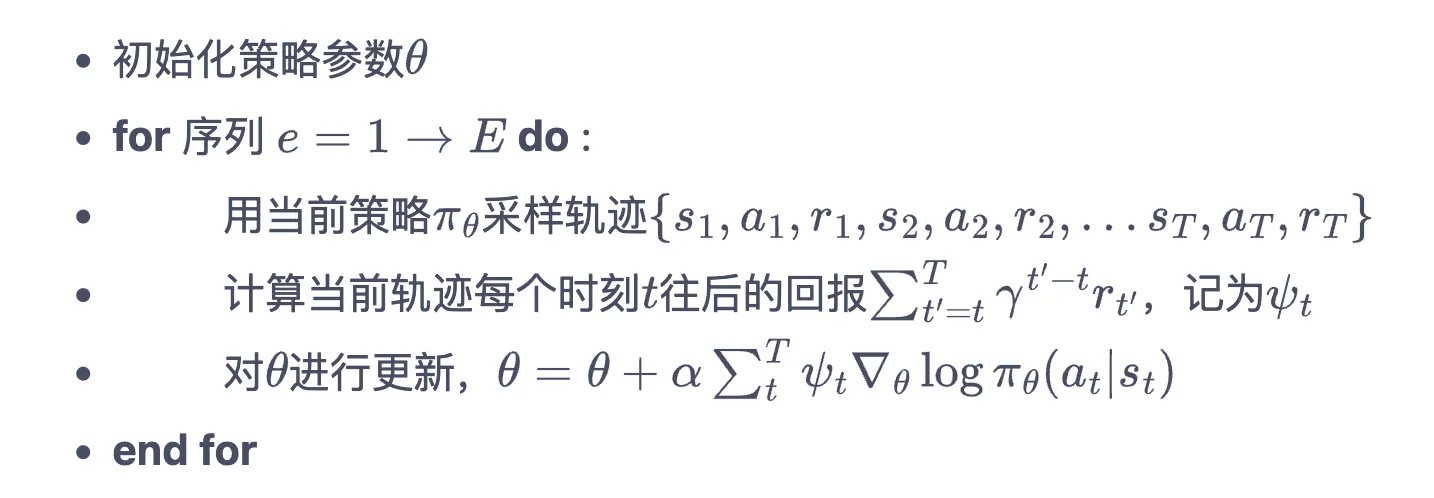
- 其中 为最大步数. 小括号内就是 ,下面第二张图中以 表示.
-
训练步骤
-
网络结构:
- Input: 可微状态
- Output: 离散动作的概率多项分布
- 损失函数: 上述梯度更新公式(去掉微分符号)

1class PolicyNet(torch.nn.Module):2 def __init__(self, state_dim, hidden_dim, action_dim):3 super(PolicyNet, self).__init__()4 self.fc1 = torch.nn.Linear(state_dim, hidden_dim)5 self.fc2 = torch.nn.Linear(hidden_dim, action_dim)6
7 def forward(self, x):8 x = F.relu(self.fc1(x))9 return F.softmax(self.fc2(x), dim=1)10
11class REINFORCE:12 def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma,13 device):14 self.policy_net = PolicyNet(state_dim, hidden_dim,15 action_dim).to(device)28 collapsed lines
16 ...17
18 def take_action(self, state): # 根据动作概率分布随机采样19 state = torch.tensor([state], dtype=torch.float).to(self.device)20 probs = self.policy_net(state)21 action_dist = torch.distributions.Categorical(probs)22 action = action_dist.sample() # 随机选一个23 return action.item()24
25 def update(self, transition_dict):26 reward_list = transition_dict['rewards']27 state_list = transition_dict['states']28 action_list = transition_dict['actions']29
30 G = 031 self.optimizer.zero_grad()32 for i in reversed(range(len(reward_list))): # 从最后一步算起33 reward = reward_list[i]34 state = torch.tensor([state_list[i]],35 dtype=torch.float).to(self.device)36 action = torch.tensor([action_list[i]]).view(-1, 1).to(self.device)37 log_prob = torch.log(self.policy_net(state).gather(1, action))38 G = self.gamma * G + reward39 loss = -log_prob * G # 每一步的损失函数40 loss.backward() # 反向传播计算梯度41 self.optimizer.step() # 梯度下降42
43# 其他一样.- 考虑最优情况的正确性:若 ,则会学到使得 尽可能大(取 -log 后尽可能小,损失尽可能小), 尽可能小(取 -log 后极大,损失极小)
- softmax 应该能防止数值爆炸.
优化问题,神经网络和强化学习
…