时序差分算法
- 用于评估价值函数, 为常数,和蒙特卡洛一样是基于采样。优点在于,每采样一步就可以更新状态估计。
- 同样会收敛。
下式中 为模拟的时间步。
1$$V(s_t) <- V(s_t) + alpha [r_t + gamma V(s_(t + 1)) - V(s_t)]$$Sarsa
-
用于求解最优策略。
-
时序差分能估计 ,但没法直接拿到策略.
-
然而时序差分算法也可以用来估计动作价值函数 :
-
以 概率采样动作价值最大的动作,剩下概率随机选一个
-
每次采样步更新:
- 字母定义见下代码
-
最后通过 Q table 的最大值获取策略
1每个时间步(已知 s 和动作 a):2 得到环境反馈 r, s'3 e-greedy 选一个 a'4 Q(s, a) <- Q(s, a) + alpha[r + gamma Q(s', a') - Q(s, a)]5 s, a = s', a'1# 训练部分2for i_episode in num_episodes:3 state = env.reset()4 action = agent.take_action(state)5 done = False6 while not done:7 next_state, reward, done = env.step(action)8 next_action = agent.take_action(next_state)9 agent.update(state, action, reward, next_state, next_action)10 state = next_state11 action = next_action12
13# 原文 Q-learning 处的写法似乎更好14...15 state = env.reset()25 collapsed lines
16 done = False17 while not done:18 action = agent.take_action(state)19 next_state, reward, done = env.step(action)20 agent.update(state, action, reward, next_state)21 state = next_state22
23
24class CliffWalkingEnv:25 def step(self, action):26 ...27 return next_state, reward, done28
29
30class Sarsa:31 def update(self, s0, a0, r, s1, a1):32 td_error = r + self.gamma * self.Q_table[s1, a1] - self.Q_table[s0, a0]33 self.Q_table[s0, a0] += self.alpha * td_error34
35 def take_action(self, state):36 if np.random.random() < self.epsilon:37 action = np.random.randint(self.n_action)38 else:39 action = np.argmax(self.Q_table[state])40 return action效果:采取比较原理悬崖的方式抵达目标。
n 步 Sarsa
- 采样到至少 步后,对最近 步实施类似蒙特卡洛的反向更新。
1class Sarsa:2 def update(self, s0, a0, r, s1, a1, done):3 self.state_list.append(s0)4 self.action_list.append(a0)5 self.reward_list.append(r)6 if len(self.state_list) == self.n: # 若保存的数据可以进行n步更新7 G = self.Q_table[s1, a1] # 得到Q(s_{t+n}, a_{t+n})8 for i in reversed(range(self.n)):9 G = self.gamma * G + self.reward_list[i] # 不断向前计算每一步的回报10 # 如果到达终止状态,最后几步虽然长度不够n步,也将其进行更新11 if done and i > 0:12 s = self.state_list[i]13 a = self.action_list[i]14 self.Q_table[s, a] += self.alpha * (G - self.Q_table[s, a])15 s = self.state_list.pop(0) # 将需要更新的状态动作从列表中删除,下次不必更新8 collapsed lines
16 a = self.action_list.pop(0)17 self.reward_list.pop(0)18 # n步Sarsa的主要更新步骤19 self.Q_table[s, a] += self.alpha * (G - self.Q_table[s, a])20 if done: # 如果到达终止状态,即将开始下一条序列,则将列表全清空21 self.state_list = []22 self.action_list = []23 self.reward_list = []训练部分不变会传入一个环境产生的 done.
效果:采取更保守的策略,更原理悬崖边。
Q-learning
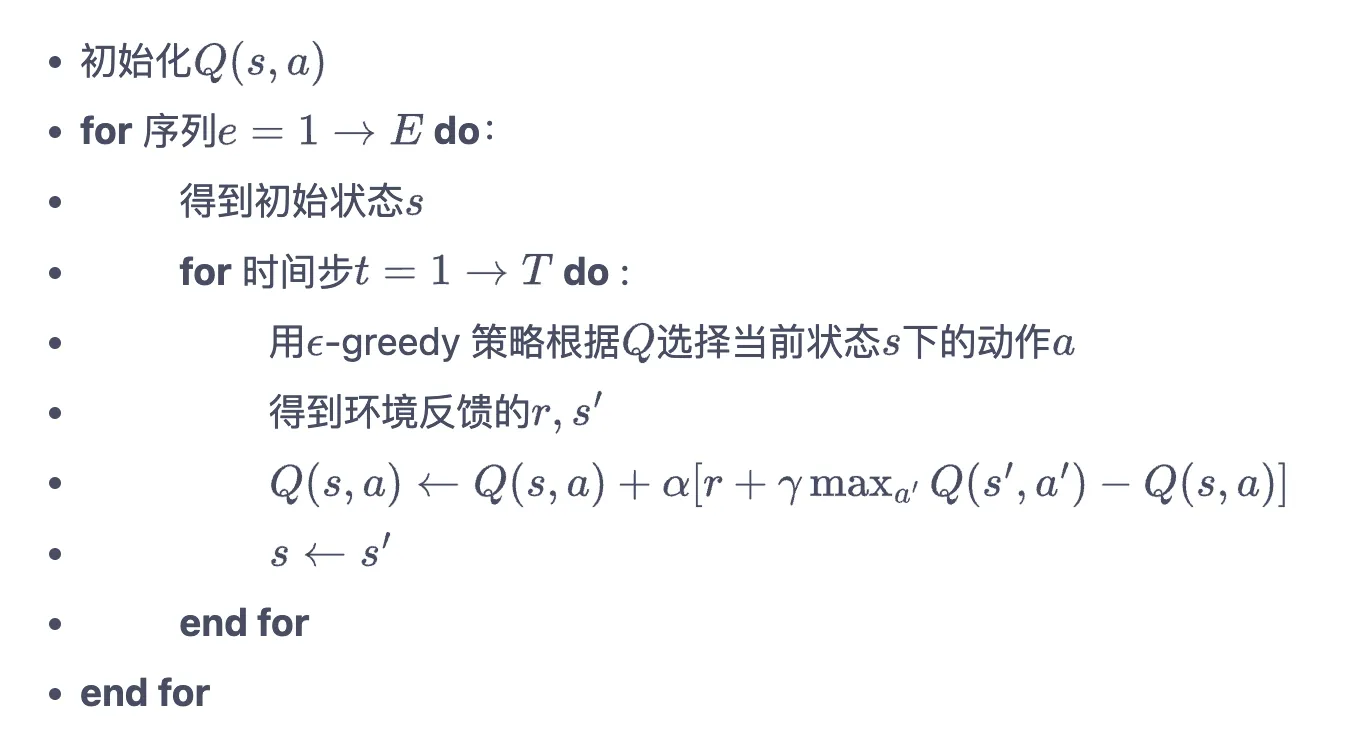
更新 Q 的公式不同,但采样过程可以用 贪心走到下一步。
1class QLearning:2 def update(self, s0, a0, r, s1):3 td_error = r + self.gamma * self.Q_table[s1].max(4 ) - self.Q_table[s0, a0]5 self.Q_table[s0, a0] += self.alpha * td_error效果:生成的策略更激进,策略回报也更优。但是交互过程采用 贪婪,常会掉进悬崖,训练过程中采样的回报较差。
在线策略和离线策略
- 原文声称,on-policy 指模拟采样策略(行为策略)和更新公式(目标策略)一致的策略。例如 Sarsa.
- 在线策略的目标就是老老实实最小化采样回报。而离线策略采样回报和严格按照策略执行的回报会不一致。
- 不一致则为离线策略
done.