12.7
- [ok, good] Jax if you know pytorch: https://zhuanlan.zhihu.com/p/660342914
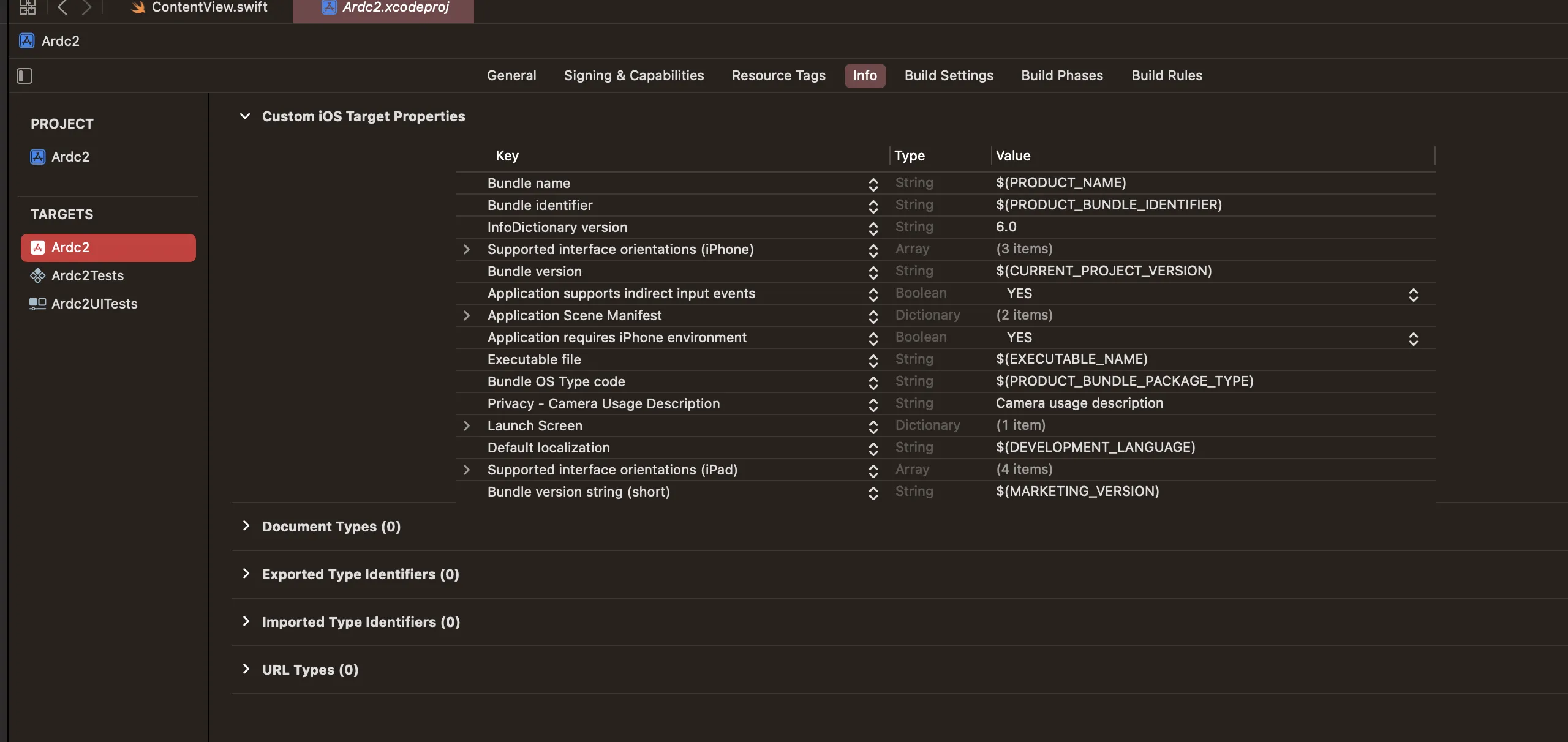
- [ok, ifound, xcode] XCode 16 add whole folder in
Copy Bundle Resources:- (这是为了让 XCode bundle files 带上路径名)
Copy Bundle Resources-> 加号 -> Add Other.. -> 选择文件夹 -> open,这样加的居然就是文件夹了
11.28
- [neovim, ok, diagnostic] Show entire diagnostics:
:lua vim.diagnostic.open_float()
11.24
- [ok, github-ci] Setup self-hosted ci in your repo:
Settings → Actions → Runners → New self-hosted runner, and follow the cmd. success! - [github-ci, bug] on mac,
A session for this runner already exists- [ok]
./config.sh --remove-> redo everything (with a difference runner name) - 关注: https://github.com/actions/runner/issues/3441
- [ok]
11.22
- [video, ok] 无刷电机我懂了: https://www.bilibili.com/video/BV1rWU4BaELU/
11.22
- [qqmusic, ubuntu22] (installed .deb)
[777463:1122/162056.379822:FATAL:gpu_data_manager_impl_private.cc(1034)] The display compositor is frequently crashing. Goodbye.- [ok] ref: https://github.com/chrismaltby/gb-studio/issues/1102
qqmusic --no-sandbox
11.21
- [git, squash] git Squash recent several commits
git rebase -i HEAD~2- make some
picktosquash,:wq
- [ghostty, ssh, tmux] open
tmuxin remote machine:missing or unsuitable terminal: xterm-ghostty- [ok] ref: https://ghostty.org/docs/help/terminfo
1Host example.com2 SetEnv TERM=xterm-256colorRoboTwin on gpu cluster
- follow Doc…
11.20
unitree_rl_lab 好耶 inference 成功 (单纯跑了 README)
11.17
- [zerotier, win] 给新红米电脑 win11 装 zerotier,今天死活配不成功.
- [blog] Swift 工程师: https://onevcat.com/
11.16
- [vim] vim replace all
#before which is not a#- [no] no good way
- [ok] git push tag:
git push origin tag <tagname> - [tree, ok] only list some file
find . -name "*.py" | tree --fromfile
unitree_rl_lab follow README
- [note, issac lab] 我只有 cu121,所以注释掉了 issac lab 安装 sh 中的 torch install(默认 cu128),然而执行 sh 还是在给我装 torch,我随便它.
- 似乎没有影响
- [disk, issac lab] 磁盘充足的情况下报错:
12025-11-16T10:49:03Z [1ms] [Error] [carb] Failed to create change watch for `/home/julyfun/Documents/issaclab-251116/env_isaaclab/lib/python3.11/site-packages/isaacsim/kit/data/Kit/Isaac-Sim/5.1/exts/3`: errno=28/No space left on device- [ok, amazing]
1cat /proc/sys/fs/inotify/max_user_watches2sudo sysctl fs.inotify.max_user_watches=52428803cat /proc/sys/fs/inotify/max_user_watches4
5# permanent:6sudo vim /etc/sysctl.conf7# add at the end8fs.inotify.max_user_watches = 52428809sudo sysctl -p10cat /proc/sys/fs/inotify/max_user_watches- [issac lab] 一大堆报错中有:
1ImportError: Unable to load any of the following libraries:libhidapi-hidraw.so libhidapi-hidraw.so.0 libhidapi-libusb.so libhidapi-libusb.so.0 libhidapi-iohidmanager.so libhidapi-iohidmanager.so.0 libhidapi.dylib hidapi.dll libhidapi-0.dll- [ok]
sudo apt install libhidapi-hidraw0 libhidapi-dev - [note, unitree_rl_lab, import error, ok]
- 这仓库 ./xxx.sh -i 以后 fish shell 里面没有加载对应环境变量,你需要
exec bash -c "source $argv; exec fish"一下
- 这仓库 ./xxx.sh -i 以后 fish shell 里面没有加载对应环境变量,你需要
- [note]
No function called "dump_pickle" from IsaacLab- [ok] https://github.com/unitreerobotics/unitree_rl_lab/issues/69
- just delete
dump_picklein train.py
- [running]
1 Learning iteration 2429/500002
3 Computation: 40704 steps/s (collection: 2.251s, learning 0.164s)4 Mean action noise std: 0.465 Mean value_function loss: 0.01316...7 Episode_Termination/base_height: 0.00008Episode_Termination/bad_orientation: 0.40179--------------------------------------------------------------------------------10 Total timesteps: 23887872011 Iteration time: 2.42s12 Time elapsed: 01:36:5713 ETA: 07:38:1211.13
- [xcode, test] about XCode test. Test Target 和 App Target 必须使用同一个账号主体
11.11
- [numpy] np.quantile 在两个点之间会线性插值。所以返回值 dtype 可能与输入不同.
1>>> a = np.array([ -9, 1, 2, 3, 4, 5, 6, 7, 8, 9, +19])2>>> np.quantile(a, 0.1)3np.float64(1.0)4>>> np.quantile(a, 0.09)5np.float64(-8.881784197001252e-16) # 线性插值6>>> np.quantile(a, 0.08)7np.float64(-0.9999999999999996)11.9
- [hollow knight save editor] https://bloodorca.github.io/hollow/
11.6
- [wandb, mirror, ok]
export WANDB_BASE_URL="https://api.bandw.top" - [zed, debug, python, ok] Zed can attach debugpy too!! in
.zed/debug.json:
1[2 {3 "label": "launch debugpy",4 "adapter": "Debugpy",5 "request": "attach",6 "tcp_connection": {7 "host": "127.0.0.1",8 "port": 40719 },10 // "cwd": "$ZED_WORKTREE_ROOT/policy/ACT",11 // "pathMappings": [12 // {13 // "localRoot": "${ZED_WORKTREE_ROOT}/policy/ACT",14 // "remoteRoot": "."15 // }10 collapsed lines
16 // ],17 "justMyCode": true,18 "autoReload": {19 "enable": true,20 "onStartup": true,21 "onSave": true22 },23 "showReturnValue": true,24 }25]- [zed, debugpy, bug, ok] always
Debugger: process exited before debugger attached
1ref: https://github.com/zed-industries/zed/issues/362182python -m venv .venv3source .venv/bin/activate.fish4python -m pip download debugpy --only-binary=:all: -d wheels5unzip wheels/debugpy-1.8.17-cp310-cp310-manylinux_2_34_x86_64.whl6deactivate7rm -rf .venv- [vim] reverse lines: select lines,
:!tac
10.20
- [mac] 互联网不能共享 因为它是受802.1X保护
- [ok] ref: https://blog.csdn.net/weixin_44729515/article/details/148684543
- 在设置 -> 网络中右键删除 Wifi 服务并添加 Wifi 服务.
10.18
- [draw, online-tools] https://www.autodraw.com/
- [online-tools, assembly] https://godbolt.org
- [online-tools, graph] https://csacademy.com/app/graph_editor/
10.16
cli translation: brew install translate-shell
trans -s en -t zh-CN -I
Vision Pro wireless pair your MacOS
10.9
- hello
9.26
- [RL] RL 会议提纲,每个算法一句话: https://ys.al/post/19#PPO
9.25
- [issue, tailscale]
sudo tailscale uphangs forever on Ubuntu 22.04- [ok] I found the problem was my Clash Verge. Shutdown it and that cmd works.
9.24
- [uv] global install
uv install --system
9.23
- [accelerate] default config path,
~/.cache/huggingface/accelerate/default_config.yaml - [blog] 做大模型和具身: https://ys.al/
- [rsync]
rsync -avz --progress -e ssh server:/1.ckpt ./1ckpt
9.5
- [learnt, mark] what is rust 依赖注入: https://chat.deepseek.com/a/chat/s/31c97f0b-a741-4922-8f0f-c572a02661ff
- [fish, konsole, 5u] fish 5u in konsole? sol:
set -Ua fish_features no-keyboard-protocols
9.4
- [to-try] OrbStack: overleaf = mongo + redis + sharelatex
9.3
- [accelerator] The following code caused accelerate to
Tried to allocate more than 1EB memory.- ref: I found by myself.
- Why spent so much time? I tried to debug into
accelrate.gather_for_meticsand found myself confused in the mechanism and ran into C lib function, also tried to reproduce this error in much simpler code but failed to! Just read the training code and I finally found something strange!
1if cfg.task.dataset.val_ratio > 0 and (self.epoch % cfg.training.val_every) == 0 and accelerator.is_main_process:2 with torch.no_grad():3 val_losses = list()4 with tqdm.tqdm(val_dataloader, desc=f"Validation epoch {self.epoch}",5 leave=False, mininterval=cfg.training.tqdm_interval_sec) as tepoch:6 for batch_idx, batch in enumerate(tepoch):7 batch = dict_apply(batch, lambda x: x.to(device, non_blocking=True))8 loss = self.model(batch)9 val_losses.append(loss)10 if (cfg.training.max_val_steps is not None) \11 and batch_idx >= (cfg.training.max_val_steps-1):12 break13 if len(val_losses) > 0:14 val_loss = torch.mean(torch.tensor(val_losses)).item()15 # log epoch average validation loss1 collapsed line
16 step_log['val_loss'] = val_loss- Debug found:
1# error at:2input_tensor.resize_(max_object_size)3
4# <= because something get a large number5opts = AllgatherOptions()6opts.asyncOp = async_op7work = group.allgather([tensor_list], [tensor], opts)8# after the above code, `tensor_list` become something like:9[tensor([4060436598173103], device='cuda:5'),10 tensor([37], device='cuda:5'), tensor([37], device='cuda:5'), tensor([37], device='cuda:5'),11 tensor([37], device='cuda:5'), tensor([37], device='cuda:5')]- corrected version:
1if cfg.task.dataset.val_ratio > 0 and (self.epoch % cfg.training.val_every) == 0:2 with torch.no_grad():3 with tqdm.tqdm(val_dataloader, desc=f"Validation epoch {self.epoch}",4 leave=False, mininterval=cfg.training.tqdm_interval_sec) as tepoch:5 num = 06 loss = None7 for batch_idx, batch in enumerate(tepoch):8 if loss is None:9 loss = self.model(batch)10 else:11 loss += self.model(batch)12 num += 113
14 if (cfg.training.max_val_steps is not None) \15 and batch_idx >= (cfg.training.max_val_steps-1):6 collapsed lines
16 break17
18 loss = loss / num19 all_loss = accelerator.gather_for_metrics(loss)20 if accelerator.is_main_process:21 step_log['val_loss'] = all_loss.mean().item()- another error, if
gather_for_metricsis commented andaccelerator.wait_for_everyone()is called:
1[rank5]:[E903 00:30:23.273591037 ProcessGroupNCCL.cpp:685] [Rank 5] Watchdog caught collective operation timeout: WorkNCCL(SeqNum=1994, OpType=ALLREDUCE, NumelIn=1, NumelOut=1, Timeout(ms)=600000) ran for 600067 milliseconds before timing out.- This is just because
wait_for_everyonestucks in all GPU process except the main one!- 只有 process 0 运行到了 wait_for_everyone 后面,其他进程都在这里停滞了. 超过 600 秒后进程报如上错误.
9.1
- [rust, dep] something good
1cargo install cargo-deps2brew install graphviz # for `dot`3cargo deps | dot -Tpng > dependencies.png8.29
- [ios, xcode, build]
1Code Signing Error: No account for team "59xxxxxxxx". Add a new account in the Accounts preference pane or verify that your accounts have valid credentials.2Code Signing Error: No signing certificate "iOS Development" found: No "iOS Development" signing certificate matching team ID "59xxxxxxxx" with a private key was found.[ok, just-for-me]: Note these are two Signing settings in your target, Debug and Release, check both dropdown menus.
8.27
- [proxy, http, to-try] 抓取 http 流量?尝试 mitmproxy @xy
- [zarr, python]
1hydra.errors.InstantiationException: Error in call to target 'diffusion_policy.dataset.cloud_pick_and_place_image_dataset.CloudPickAndPlaceImageDataset':2PathNotFoundError("nothing found at path ''")3full_key: task.dataset[sol]: miss .zgroup file in .zarr
8.26 Tue.
- [huggingface, mirror] hf-mirror as endpoint is ok for private repo.
8.19
- [mac, cpp] 输出 -I 路径
clang++ -v -c -x c++ /dev/null - [mc server, rust] (active) https://github.com/ferrumc-rs/ferrumc/tree/master
- [rust, getrandom, wsl2, cross-compile for win64]
1error: Error calling dlltool 'x86_64-w64-mingw32-dlltool': No such file or directory (os error 2)2
3error: could not compile `getrandom` (lib) due to 1 previous error4warning: build failed, waiting for other jobs to finish...[ok] solution:
1❯ sudo apt install mingw-w648.17
- [mac, input-method] 取消输入法切换延迟
hidutil property --set '{"CapsLockDelayOverride":0}' &> /dev/null
8.13
- [huggingface-cli]
1# if you upload <local_dir>, things in <local_dir> will be in <target_dir>2huggingface-cli upload --private julyfun/private ./<local_file> <target_dir> --repo-type dataset3# the downloaded local path will starts with 'umi_base/49bb725486f80deb/'4# If you want to download a dir, `**/*` is needed.5huggingface-cli download julyfun/private --include 'umi_base/49bb725486f80deb/**/*' --local-dir ./ --repo-type dataset6export HF_HUB_DISABLE_XET="1"7
8# [something useful]9huggingface-cli upload --private julyfun/private ./x x/x --exclude "**/epoch=*.ckpt" --repo-type dataset8.7
- [vscode, python-debug] note: execute
python3command in the workspace root!
1 import debugpy2 debugpy.listen(4071)3 print("Waiting for debugger to attach...")4 debugpy.wait_for_client()launch.json:
1{2 "version": "0.2.0",3 "configurations": [4 {5 "name": "Python Debugger: Remote Attach",6 "type": "debugpy",7 "request": "attach",8 "connect": {9 "host": "localhost",10 "port": 407111 },12 "pathMappings": [13 {14 // Should be the location of `import debugpy` file15 "localRoot": "${workspaceFolder}",13 collapsed lines
16 "remoteRoot": "."17 }18 ],19 "justMyCode": true,20 "autoReload": {21 "enable": true,22 "onStartup": true,23 "onSave": true24 },25 "showReturnValue": false,26 },27 ]28}8.6
- [deprecated] 集群 training 连不上 wandb!
- [trying] ref: https://blog.csdn.net/qq_37683597/article/details/135173640
- export WANDB_MODE=offline
7.31
- [rust] Good bevy example 用俄罗斯方块例子快速过一遍 Component, Entity 等概念.
7.29 Tue.
- Apple AI report: https://machinelearning.apple.com/papers/apple_intelligence_foundation_language_models_tech_report_2025.pdf
7.25
7.25
7.25
7.25
7.25
7.24
- [transform, urdf, 坐标系, ARKit] 各种坐标系
1- AR Workspace: 右手2 - x+ 右3 - y+ 上4 - z+ 靠近5- ARKit Camera: 右手6 - x+ 屏幕右7 - y+ 屏幕上8 - z+ 屏幕朝向用户9- ARKit Origin: 右手. 其 z 轴水平,但朝向取决于初始化.10 - x+ 水平右11 - y+ 重力上12 - z+ 水平,朝向用户13- Unity-like Camera 伴生坐标系: 左手14 - X 轴:屏幕右15 - Y 轴:屏幕上7 collapsed lines
16 - Z 轴:屏幕远离用户17- ARKit 给出的是: arkit_camera in arkit_origin 即 arkit_camera to arkit_origin 的变换矩阵18- Urdf Workpace: 右手19 - `urdf-viz resources/flexiv_rizon4_kinematics-j.urdf`20 - x+ 桌面前(远离)21 - y+ 桌面左22 - z+ 朝上7.23
- vscode-like grep: https://github.com/nvim-telescope/telescope-live-grep-args.nvim
- [unsure, ssh, config] Try this in ssh config
1 IPQoS throughput # 避免 QoS 限制2 Compression yes # 启用压缩3 Ciphers [email protected] # 改用低开销加密4 ServerAliveInterval 15 # 保持连接7.20
- [bun, npm, mirror] set bun npm mirror in
~/.bunfig.toml(This is alibaba mirror)
1[install]2registry = "https://registry.npmmirror.com"- [linux, ports] List used posts and process name
1netstat -tulpn2lsof -i -P -n | grep LISTEN- [rec, disk, 2] dua-cli
7.17
- [mac, softwares, apps, works-today] https://www.macwk.com/soft/all/p1
- [dl, deep-learning, scratch, pytorch] https://github.com/labmlai/annotated_deep_learning_paper_implementations
- [not-good, zed, python, lsp, works-today, remote-ssh, pixi, I-dont-know-why] Use extension Python-LSP.
1pixi run pip install python-lsp-server
- 注意可能启动消耗一分钟,这段时间 lsp 没有反应. 启动后可快速跳转,但是不准确.
- 注意其实 Zed 现在默认使用内置 Pyright(不是插件的 BasedPyright)。但是大项目中反应极慢,查找定义会消耗 10s 且过程中无反馈,容易误以为没有 lsp.
- [ok, zed, python, remote-ssh, lsp] 手动指定 python 路径.
1pixi run pip install basedpyright
- using this in project
.zed/settings.json:
1{2"languages": {3"Python": {4"language_servers": ["basedpyright", "!pyright"]5}6},7"lsp": {8"basedpyright": {9// "binary": {10// "path": ".venv/bin/basedpyright-langserver",11// "arguments": ["--stdio"]12// },13"settings": {14"python": {15"pythonPath": ".pixi/envs/default/bin/python"11 collapsed lines16},17"basedpyright.analysis": {18"diagnosticMode": "workspace",19"inlayHints": {20"callArgumentNames": false21}22}23}24}25}26}- problem: 会有奇怪的 redundant open file 报错通知,以及过严格的类型检查.
- using this in project
7.16
- [ai prompt, todo]
1代码风格简洁、优雅:2 * 注释用英文写. 不要写冗余注释,例如不要在 `saveToConfig()` 上写“保存到配置”。若代码难以阐释自身目的,才加注释.3 * Communicate intent precisely.4 * Edge cases matter.5 * Favor reading code over writing code.6 * Only one obvious way to do things.7 * Runtime crashes are better than bugs.8 * Compile errors are better than runtime crashes.9 * Incremental improvements.10 * Avoid local maximums.11 * Reduce the amount one must remember.12 * Focus on code rather than style.13 * Resource allocation may fail; resource deallocation must succeed.14 * Memory is a resource.15 * Together we serve the users.- [git, diff, ok] show history of file
git log -p -- <file>
- luogu utils
- [to-try, markdown in-place render typst math] https://github.com/folke/snacks.nvim/blob/main/docs/image.md
- [urdf, solidworks, to-try] Solidworks导出URDF模型
- [to-try, win, disk] https://diskanalyzer.com
- [rust, mac15.3] error: Unknown binary ‘rust-analyzer’ in official toolchain ‘stable-aarch64-apple-darwin’.
- [ok]
rustup component add rust-analyzer - ref: https://stackoverflow.com/questions/77453247/error-rust-analyzer-is-not-installed-for-the-toolchain-stable-x86-64-unknown
- [ok]
- [to-try] MCP for neovim: https://github.com/ravitemer/mcphub.nvim
- [to-try, docker, gui] https://medium.com/@priyamsanodiya340/running-gui-applications-in-docker-containers-a-step-by-step-guide-335b54472e4b
- pixi(cuda-toolkit + pytorch) + uv(others) ?
- 都是虚拟环境管理器,冲突了。
- pixi +
pixi add --pypi $(cat requirements.txt)(without comments)pixi shell- [ok] !
- [transform, robot TCP, real-machine-verified, draft]
1T0^ Ti = C0^ Ci2
3C0 是相机的天然坐标系4Ci = C0 T0^ Ti5
6[e.g.]7C0 = I8Ci = [0, 0, -1]9in T0?10
11需要设置 TCP 的 rotation 保持与相机的天然坐标系一致.12
13[信息]14看到杯子在前方,朝着相机正前方向移动- [pixi, pip, ok] pixi force pip install
1[dependencies]2pytorch-gpu = "*"3python = "==3.10.18"4pip = "*"pixi run pip install numpy==1.26.4
7.11
- iTerm2 I’m using this font: 0xProtoNerdFont
7.10
- [huggingface python prox, ok]
1snapshot_download(2 repo_id="TianxingChen/RoboTwin2.0",3 allow_patterns=["background_texture.zip", "embodiments.zip", "objects.zip"],4 local_dir=".",5 repo_type="dataset",6 proxies={"https": "http://localhost:7897"},7 resume_download=True,8)- [zotero, macos, shortcut] 高亮快捷键: Alt + 1, Alt + 2..
- [rust]
- minimize rust bin size: https://github.com/johnthagen/min-sized-rust
- zotero is still needed? https://www.alphaxiv.org/abs/2503.02881
- [nvim, markdown] code blocks are rendered all red!
- 其实是 init.vim 中的 colorscheme 和 init.lua 中的冲突了.
7.9
- [vla] https://github.com/TianxingChen/Embodied-AI-Guide
- [to-try] C++ 文档注释: doxygen
- 监视文件变化: fswatch
- [to-try, net] Tailscale
- [好东西] [email protected]/RoboTwin.git
- 各种 Model 和 VLA 都写进去了.
- [rust, uniffi, swift, kotlin]
- [xcode proj github ci, to-try] https://qualitycoding.org/github-actions-ci-xcode/
7.8
- [flash.nvim, vscode] use flash.vscode(latest) souravahmed
- 放弃!这些 flash 与搜索冲突了.
7.5
- 今天腾讯云 OSS 欠费了,图床炸。充了 20 块.
- Start nvim plugin from zero
- note:
init.vimandinit.luacan’t exist at the same time.
- note:
7.4
- [python, sys, path, main, cwd] python a/b/c/main.py
- 则 cwd 是当前 shell 的 pwd,而不是 a/b/c. os.path.abspath() 之类的都基于 cwd
7.3
- [clash, 覆写配置, doc, works-today] https://www.clashverge.dev/guide/merge.html?h=覆写
- Debug xcode not working?
- Reason: disabled Debug
- see: https://stackoverflow.com/questions/64790/why-arent-xcode-breakpoints-functioning
- enable it: Product->Scheme->Edit Scheme->Run->Info / (Cmd + <)
- 开启后可能导致 ciContext.render() RE 和性能损耗
- Reason: disabled Debug
- [Swift, strange-rules]
- if view
ahas @ObservedObjectm1(@ObservableObject),m1hasm2(@ObservableObject)with@Published,- then m2 must be @ObservedObject. else there will be serious bugs!
- if view
6.28
- [astro] …slug:
- To generate recursive paths for posts, see: https://docs.astro.build/en/guides/routing/
- [ok] for me.
6.27
- Xcode keep folder structure in Bundle Resources
- [ok] ref: https://stackoverflow.com/questions/79036956/how-to-build-structured-resources-folder-in-bundle-with-xcode-16
- Go to Copy Bundle Resources Phase
- Click the + Button
- Click Add Other
- Select the top directory of the structure you want to add
- In the “Choose options for adding these files” dialog, tick Create folder references
- Click Finish
6.24
- [vscode, 居中, cursor] Maintain screen position always centered on cursor
- set “cursorSurroundingLines” to 500.
- 注意这是设置光标不会超过屏幕上下 20 行, 你光标不动的话这个设置也无效.
- [ ]
- [zig, string]
6.26
- [mac] 应用电量测试
1sudo powermetrics -i 1000 --poweravg 1 | grep 'Average cumulatively decayed power score' -A 206.25
- [haskell] 试图理解 fmap
1fmap (+3) [1, 2, 3] = [4, 5, 6]2fmap (+3) 1 = 43
4fmap5.in: {6 param(7 .name: f8 .type: Fn(A) -> B9 )10}11.return {12 .type: Fn(x: T) -> T13 where T: getele() -> A + cons(A) -> T14 .process: {15 ...2 collapsed lines
16 }17}6.17
-
[zig, 第三方库 registry] https://zigistry.dev/
-
[ios, swiftui] Ask ai.
-
@State 等属性包装器变量在 init() 中不可用。
-
那问题来了。我有一些数据处理模块,其与 UI 解耦,根据一定的配置执行初始化。用户可以通过 View 修改配置,配置文件会持久化存储在硬盘中。那如果这个配置的管理器是 @ObservedObject 等属性之一,就不能在 UI 的 init() 中调用配置管理器,可能无法满足需求.
-
满足 UI 和非 UI 均可访问配置的简洁、现代实践是?不使用单例.
6.11
- [.DS_Store, not tested]
defaults write com.apple.desktopservices DSDontWriteNetworkStores true
6.6
- [vscode, swift lsp, xcode project] Settings up VSCode LSP for xcode project.
- Install Extension
SwiftandSweetpad - Follow the 3 steps in : https://sweetpad.hyzyla.dev/docs/autocomplete/
- brew install xcode-build-server —head
- Command: SweetPad: Generate Build Server Config
- build the project in the Sweetpad extension panel.
- [ok] Then the lsp works for me.
- Install Extension
6.5
- [xcodebuild]
xcode-select: error: tool 'xcodebuild' requires Xcode, but active developer directory '/Library/Developer/CommandLineTools' is a command line tools instance- I have installed xcode
- [ok] with
sudo xcode-select -s /Applications/Xcode.app/Contents/Developer
6.3
- [not tested, macos keyboards] macos 长按字母无法连续输入.
6.1
- [tested good] Isaac Sim GUI: http://zhaoxuhui.top/blog/2022/12/08/omniverse-and-isaac-sim-note4-omnigraph-and-control-robot-with-keyboard.html#1omnigraph%E7%AE%80%E4%BB%8B
- Isaac Sim Python API: https://blog.csdn.net/m0_56661101/article/details/139936671
5.27
- [ros, ros2, 包管理, macos] robostack 可以在 mac 上轻松管理 ros. 基于 pixi.
5.20
- [zerotier, 内网穿透] 使用 moon 搭建.
- 说明:planet 是全球网路管理,moon 仅负责中继。通常来说只改 moon 的方案用的是官方 planet.
- 详细的 moon 方案博客: https://blog.03k.org/post/zerotier-moon-ui.html
- 简洁 moon 方案博客: https://www.cnblogs.com/cx850116/p/17805450.html
- AI to understand github repo: https://deepwiki.com/
5.18
- [outdated, 输入法, input-method, ubuntu-22.04] 今天终于安装好了 ubuntu22.04 sogou pinyin!
1sudo apt-get install fcitx2sudo apt purge ibus3sudo apt install libqt5qml5 libqt5quick5 libqt5quickwidgets5 qml-module-qtquick2 libgsettings-qt14sudo apt install -y libqt5qml5 libqt5quick5 libqt5quickwidgets5 qml-module-qtquick25sudo apt install -y libgsettings-qt1- 如果其他步骤做完后无效,可尝试取消注释下面文件中的
WaylandEnable=false(ref: https://www.cnblogs.com/amsilence/p/18344774). 这次我取消注释了没重启,应该等于没注释,装好搜狗我又立刻注释上了.
1cat /etc/gdm3/custom.conf | grep WaylandEnable- 注意:不要使用 apt. 使用 apt 安装后在键盘设置-Configure 中找不到 sogoupinyin,但是 dpkg 安装可以.
1sudo apt remove sogoupinyin # 因为我之前 apt 装的.2sudo dpkg -i sogoupinyin_4.2.1.145_amd64.debOK 成功显示搜狗拼音. Firefox ok!
Edge 还是不行. 但其他软件的体验都不错。
5.15
- ARKit 流程: https://juejin.cn/post/7177321621932212279
- VLA 大整理(网络结构): https://zhuanlan.zhihu.com/p/7371838810
5.14
- [pip, uv, 1] no module named
pip- ref: https://github.com/astral-sh/uv/issues/1551
- [ok] uv pip install pip
5.11
- [install fonts for ubuntu, and for typst, ubuntu22.04]
- 下载 ttf / otf. 都行
sudo cp Times\ New\ Roman*.ttf /usr/share/fonts/truetype/sudo fc-cache -f -vfc-list | nvim查看一下- [ok] 重启 VSCode 在 VSCode Tinymist Preview 中自动显示了相关字体.
5.10
- iPhone 连接 5Ghz wifi 过程中,路由器更改了 WPA 协议,iPhone 自动断开连接后,无法重连此网络.
- [ok] reset 路由器. (路由器所有设置从头再来)
5.9
- [net, ios, ping] Can’t ping iphone?
- [ok] Check WPA settings. Set to “WPA2 个人版(WPA2 AES)” instead of “WPA / WPA2” solved the problem for me.
- [high latency, unstable] seems related to 2.4GHz. I’ll try 5GHz.
5.7
5.1
- [wifi, cli]
nmcli dev wifi connect sic-guest password xxx- kernel module
lsmod | grep wifisudo modprobe -r <模块名> # 例如:sudo modprobe -r iwlwifisudo modprobe <>
- or
sudo systemctl restart NetworkManager-dispatcher.service
- [watch with sudo, ok]
watch -n 2 "echo xxx | sudo -S ls"
4.29
- [dataset, visualize] huggingface 上录的数据集可以可视化: https://huggingface.co/spaces/lerobot/visualize_dataset?dataset=julyfun%2Fso100_pick_and_place_v4_50&episode=0
- [机器人动力学大纲] https://blog.csdn.net/Bellwen/article/details/129200899
- 拉格朗日力学
- 多自由度机器人的动力学方程
- 机器人的静力分析
- 坐标系间力与力矩的变换
- [毕设] 写论文看这个,讲到了各种痛点: https://www.bilibili.com/video/BV1QxB9YuERU
- 22:04 视角 Diversity 可视化
4.27
- [pi0 and VLA introduction] https://huggingface.co/blog/pi0
4.25
- [flow-matching, diffusion] 经典知乎直观理解 diffusion: https://zhuanlan.zhihu.com/p/11228697012
- [diffusion, DDIM, DDPM, flow-matching] 知乎公式推导: https://zhuanlan.zhihu.com/p/12591930520
4.24
- [ssh, gui, x11, xquartz, x11-forward]
- 今天以如下 config,macos 本地 export DISPLAY=:0 后
ssh xxx,直接运行xclock可在 mac 端显示. - 还需要在 XQuartz 菜单中,前往 Preferences → Security. 确保勾选 “Allow connections from network clients”
- 今天以如下 config,macos 本地 export DISPLAY=:0 后
1Host xxx2 HostName 127.0.0.13 Port 334464 User xxx5 ProxyJump xxx.com6 LocalForward xxxx 127.0.0.1:xxxx7 LocalForward xxxx 127.0.0.1:xxxx8 ForwardX11 yes9 TCPKeepAlive yes10 ProxyCommand ssh -CY -W -N -v %h:%p xxx.com4.22
- Today installed ubuntu!
- uv install python? Must explicity choose python==3.10.16
- python 3.10.0 or python 3.10 will encounter tk init.tcl error.
- [torch, nvidia-smi] 运行 torch 项目时,torch
torch._C._cuda_getDeviceCount()报错- 发现
nvidia-smi也没了 - [ok] 重启电脑解决. ref 地址忘了。
- 发现
4.19
- @State 等装饰器的解析: https://fatbobman.com/zh/posts/exploring-key-property-wrappers-in-swiftui/
- [坐标变换, transform, pnp] 以下说法等价:
-
- 某点在 A 下的坐标为 p, B 下坐标为 T * p,
-
- [A to B] 坐标系 A 到坐标系 B 的变换为 T .
-
- [A in B] A 的轴和原点在 B 下可用 T 表示. T 的第一列是 A 的 x 轴在 B 下的表示.
-
- [ros tf2] target = B, source = A (通常 target 为 base, source 为执行器)
- 注意:A2C = B2C * A2B
- 例如:
- pnp 给出的 tvec 是自定义系的坐标原点在相机系下的表示,
- 即 pnp 变换给出的变换被称为:自定义系 to 相机系的变换
- 或者说自定义系点 x 经过 Tx 得到相机系下表示
- 平移旋转顺序:
- 当你观察某点从 A 系表述转换到 B 系表述时:
- 先将 A 系表述旋转 R,再加上平移量 T.
- 当你观察 B 系的轴如何转换到 A 系轴时:
- B 先在自己系下平移 T,然后再自己系下延伸出 R 三个列向量.
- 当你观察某点从 A 系表述转换到 B 系表述时:
- What does mean?
- 假设 A & B 都是同一个坐标系下的表述,例如 TCP pose at & TCP pose at ,都是相对基座的变换.
- Then .
- So means “B in A”.
-
- [rotation] R 数值的意义
- R 的第一列就是其 x 轴在世界坐标系下的的坐标.
- 证明:考虑
x_in_R = [1, 0, 0],R * x = ...
- 证明:考虑
- R 的第一列就是其 x 轴在世界坐标系下的的坐标.
4.4
- [ssh, network] 这后面四个选项加了似乎 zerotier 内网 ssh 连接稳定多了
1Host 4070s2 HostName 10.238.189.1873 User julyfun4 Port 22225 RequestTTY force6 IPQoS throughput # 避免 QoS 限制7 Compression yes # 启用压缩8 Ciphers [email protected] # 改用低开销加密9 ServerAliveInterval 15 # 保持连接4.2
3.10
- 黄缘高背研究 https://xuebao.dlou.edu.cn/article/2018/2095-1388/201806013.html
- 黄缘生长研究 http://journal.xynu.edu.cn/cn/article/id/3481b16c-1ded-43f0-9c59-a32e86f9b5fc
3.7
- win + space 前几天能正常切换输入法。今天突然变成会在窗口左上角打开一个带“还原,最小化”的windows窗口菜单,怎么会是
- [ok] 重新插拔键盘
- A6000 配 frp? to try:
3.4
-
[ios, view dev app file]
- [ok] insert these two keys two:
- UIFileSharingEnabled: True
- LSSupportsOpeningDocumentsInPlace: True
- ref:
https://stackoverflow.com/questions/49128223/how-to-view-the-files-directories-created-by-my-ios-app-in-xcode
- [ok] insert these two keys two:
-
[lerobot, dp]
- simplest trainng with on commit
5daa454, ok withpython3 examples/3_train_policy.py
- simplest trainng with on commit
-
[dl basic]
- step: train a batch
- epoch: train through the dataset once
- episodes: ONLY IN RL. Interact from start to end once.
- 从初始状态到终止状态的完整交互序列。例如,在游戏中,一个episode是从游戏开始到游戏结束的整个过程。
3.2
- something
- 20:29 back to swift bson object writing.
- . buy Cursor Pro.
- 20:53 BSON? -> had to learn Swift again
- 20:29 back to swift bson object writing.
- [ios, xcode] After adding dependencies, import Module : failed
- [ok] readd the Module
- 确保有 add to target: TargetName 选项
- [ok] readd the Module
2.28
- [DDPM, DDIM] 正常写的 DDPM。DDIM 利用一个概率推论进行隔步采样,提升推理速度。
- [Xcode, add dependencies]
- [err] Authentication failed because no credentials were provided
- [ok] 我关闭了 gitconfig 的 URL 替换就可以了
- [next time] 可以试试这个 https://github.com/KeyboardKit/KeyboardKit/issues/78#issuecomment-1121145834
1# [url "[email protected]:"]2 # insteadOf = https://github.com/2.27
- [ios, xcode, camera usage, err]
- 打开相机时崩溃,需要 Privacy…
- [ok]
https://stackoverflow.com/questions/67896404/where-is-info-plist-in-xcode-13-missing-not-inside-project-navigator 
2.27
- [x]
2.27
- [x]
2.26
- [wsl, matplotlib, chinese font]
1sudo apt-get update2sudo apt-get install fonts-wqy-microhei fonts-wqy-zenhei3sudo fc-cache -fv(如果其他步骤不行,继续运行:)
1# 创建字体目录(如果不存在)2sudo mkdir -p /usr/share/fonts/windows3
4# 创建符号链接到 Windows 字体目录5sudo ln -s /mnt/c/Windows/Fonts/* /usr/share/fonts/windows/6
7# 更新字体缓存8sudo fc-cache -fv1import matplotlib.pyplot as plt2import matplotlib.font_manager as fm3import matplotlib as mpl4
5# [must] 删除这里输出的 dir6print(mpl.get_cachedir())1plt.rcParams['font.sans-serif'] = ['SimHei', 'WenQuanYi Micro Hei', 'WenQuanYi Zen Hei', 'Microsoft YaHei', 'SimHei', 'DejaVu Sans']2plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题如何检查字体:
1def check_font():2 print("Available fonts:")3 fonts = [f.name for f in fm.fontManager.ttflist]4 chinese_fonts = [f for f in fonts if ('micro' in f.lower() or5 'wenquanyi' in f.lower() or6 'microsoft' in f.lower() or7 'simhei' in f.lower())]8 for font in chinese_fonts:9 print(f"- {font}")10
11check_font()2.21
- [csdiy] for lmz
- 4070s added something here.
- mac added something else here.
2.12
- [wsl] lerobot
-
[err, ok] GUI 无法渲染?
export WGPU_BACKEND=vulkan- 但这样就 CPU GUI 了,需要想个办法解决.
- [later] REF 呢!
-
ACT 原理和实现
- 1.
- 原理
https://blog.csdn.net/v_JULY_v/article/details/135454242 - 实现
https://blog.csdn.net/v_JULY_v/article/details/135566948
- 原理
- 1.
-
[err] train.py 时,hf.co 下载数据有网络问题:
- [ok] 使用命令行添加以下环境变量:
-
1os.environ['CURL_CA_BUNDLE'] = ''2os.environ['HF_ENDPOINT'] = 'https://hf-mirror.com'- ..
- 训练中…
- [err] 居然遇到极其罕见的 address boundary error!
- 估计是 torch 版本错了,重新安装.
2.9
- [wsl, disk, disk-space] 压缩 wsl2 磁盘空间
https://blog.csdn.net/qq_42493281/article/details/142614928?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7Ebaidujs_baidulandingword%7ECtr-1-142614928-blog-135723290.235%5Ev43%5Epc_blog_bottom_relevance_base3&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7Ebaidujs_baidulandingword%7ECtr-1-142614928-blog-135723290.235%5Ev43%5Epc_blog_bottom_relevance_base3&utm_relevant_index=2- 其中 ext4 位置获取方式:
https://learn.microsoft.com/en-us/windows/wsl/disk-space#how-to-locate-the-vhdx-file-and-disk-path-for-your-linux-distribution- 即命令
(Get-ChildItem -Path HKCU:\Software\Microsoft\Windows\CurrentVersion\Lxss | Where-Object { $_.GetValue("DistributionName") -eq '<distribution-name>' }).GetValue("BasePath") + "\ext4.vhdx" - mine is
C:\Users\julyfun\AppData\Local\Packages\CanonicalGroupLimited.Ubuntu_79rhkp1fndgsc\LocalState\ext4.vhdx
- 即命令
- [ok] seem to work today.
- Wsl docker 有独立 vdisk,也可以查查形如
C:\Users\julyfun\AppData\Local\Docker\wsl\disk
1diskpart2select vdisk file="C:\Users\julyfun\AppData\Local\Packages\CanonicalGroupLimited.Ubuntu_79rhkp1fndgsc\LocalState\ext4.vhdx"3attach vdisk readonly4compact vdisk5detach vdisk6exit- [vscode-copilot, wsl, network] keeps saying “you are currently offline”
- [ok] see:
https://github.com/microsoft/vscode-copilot-release/issues/3275#issuecomment-2560561520
- [ok] see:
- [zig, vscode, lsp] zig specific zls setting:
1 "zig.zls.enabled": "on",2 "zig.zls.zigLibPath": "/home/julyfun/zig/0.14.0-dev.2577+271452d22/files/lib",2.5
- Clash verge 2.0.3 macos 14 开 TUN 以后所有节点就 Error?
- [ok] try this, seems ok for me.
- [err] 25.3.4 开启 TUN 后浏览器正常,测试节点全可,但 xcode 浏览 add dependencies 困难,且 clash 测试网站看上去像没翻. 暂时关闭 TUN

1.16
- [win, cfg, harm]
https://blog.csdn.net/yusuhbdybxbdhj/article/details/134295439- 做了此博客方法二试图关闭 win 自动更新
1.12
- [c, bug, strange, rerun] 修改函数竟然导致某个毫无关系的函数行为突变?
- 建议检查是否有变量或数组没有初始化或合理处理字符串尾部
\0- 今天是因为修改后程序地址变化,导致初始化数组发生了随机内容变化.
- 建议检查是否有变量或数组没有初始化或合理处理字符串尾部
1.9
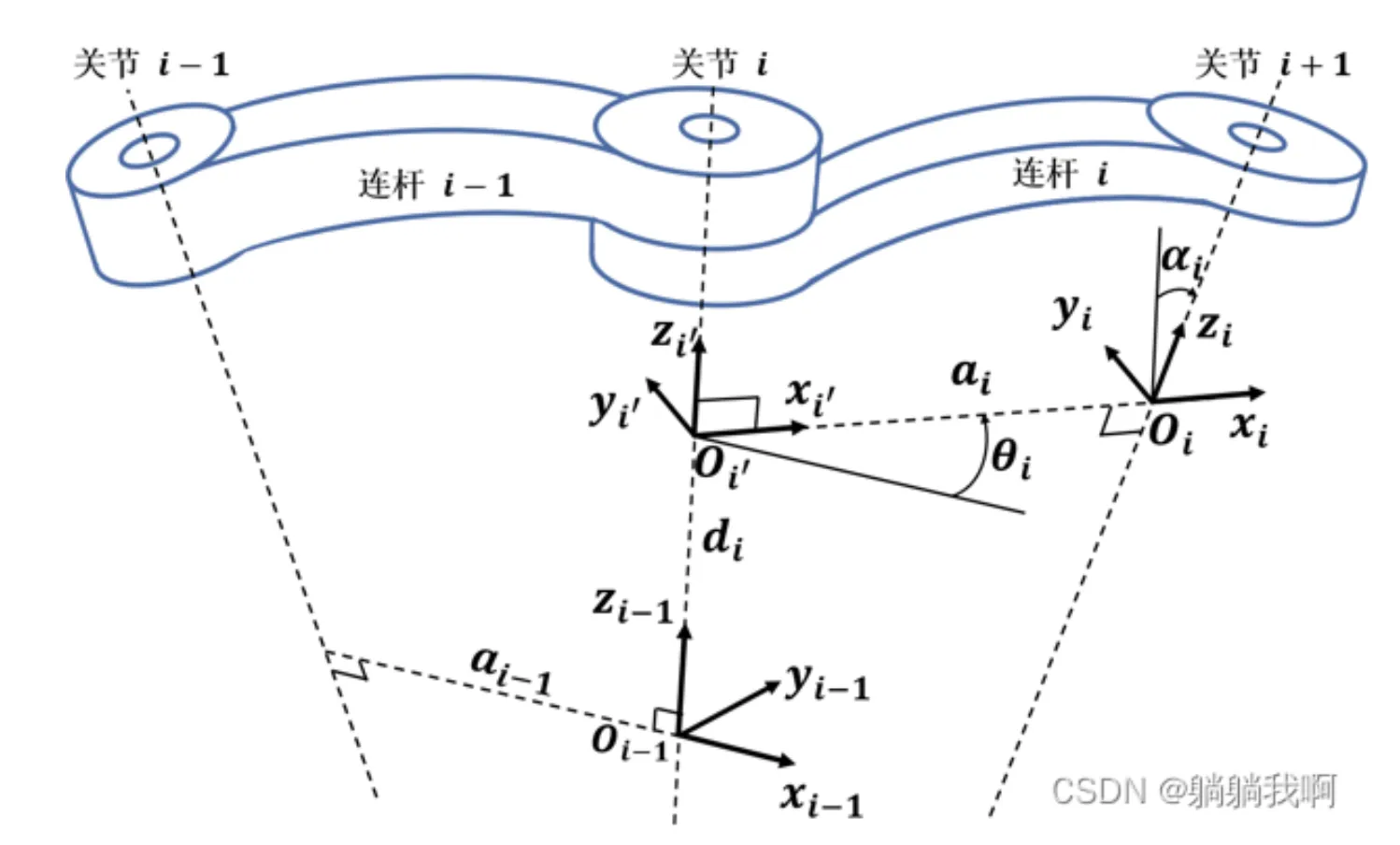
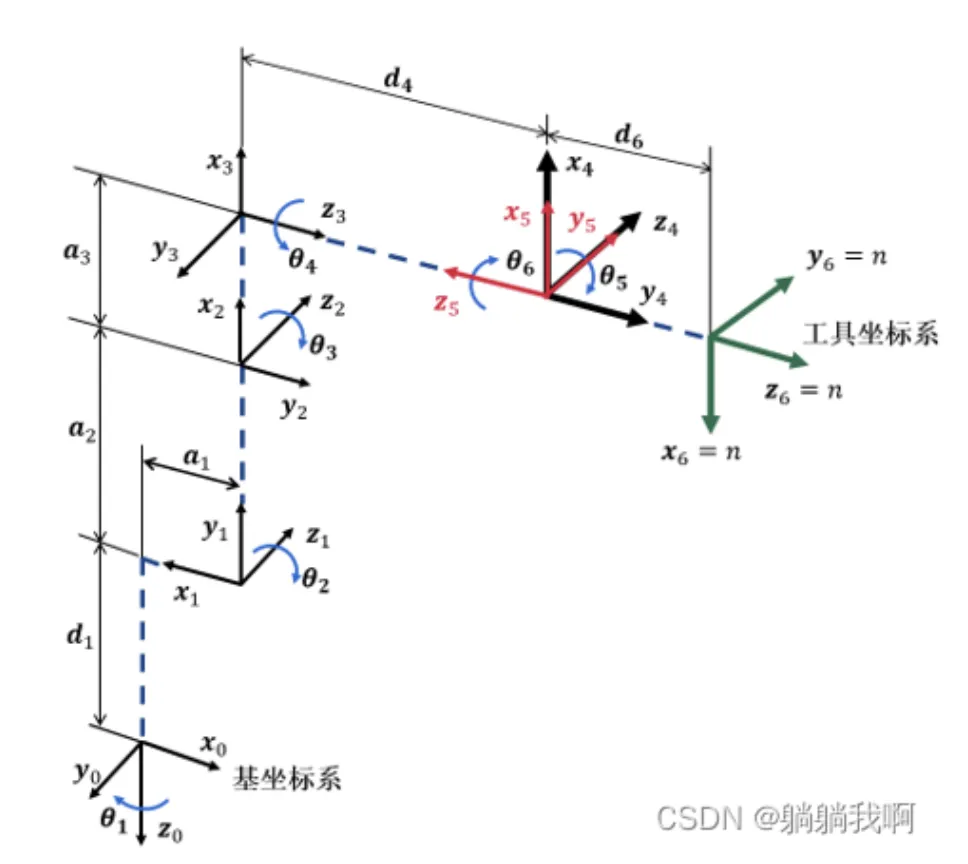
- [dh, dh 表, dh table]
- 同时看以下两篇:
https://blog.csdn.net/m0_53966219/article/details/125569775https://www.bilibili.com/opus/678485643185094659- [by-someone]
- 通常需要相邻三个关节才能确定 处的值. 第 个坐标系定义在第 个关节 轴上.
- 关节 i 旋转轴为 zi 轴
- 取 与 的公共垂线段,两点定义为 ,
- x 轴:从 到 的方向. 公垂线方向.
- ai: 到 长度,公垂线段长度。
- 两轴相交时为 0.
- di: 到 的长度。
- 两轴平行时似乎任意,可为 0.
- : 轴到 轴旋转角. 将后一坐标系的 x 轴作为旋转轴可以确定正方向.
- 两轴平行时为 .
- : x 轴夹角. 以 为旋转轴. 通常就是关节角。
- 最后一个坐标系在 tcp,方向可参考下图:
- [wsl2, disk, windows] 压缩 wsl2 硬盘空间(单调递增的)
1.8
- [tree, hide ignored]
git ls-tree -r --name-only HEAD | tree --fromfile
1.7
- [python, geometry, lib] python 2d 几何包 shapely: https://www.cnblogs.com/feffery/p/16989398.html
- 以后还是先搜搜相关包吧.
1.1
1RuntimeError: cuDNN Frontend error: [cudnn_frontend] Error: No execution plans support the graph.- ref: https://huggingface.co/posts/beomi/478366490704768
- [ok] Fixed by using pytorch 2.4.0 rather than 2.5.0
1pipeline = DDPMPipeline.from_pretrained('julyfun/sd-class-butterflies-32')- [err] this can’t find bin file.
- [ok]:
huggingface-cli download julyfun/sd-class-butterflies-32then reload the pipe.
12.25
- [gpu, memory] 杀了这些以后 GPU memory 正常了:
1PS C:\Users\julyfun> Stop-Process -Name "ToDesk" -Force2PS C:\Users\julyfun> Stop-Process -Name "slack" -Force3PS C:\Users\julyfun> Stop-Process -Name "slack" -Force4PS C:\Users\julyfun> Stop-Process -Name "rustdesk" -Force5PS C:\Users\julyfun> Stop-Process -Name "todesk" -Force6PS C:\Users\julyfun> Stop-Process -Name "todesk" -Force7PS C:\Users\julyfun> Stop-Process -Name "explorer" -Force8PS C:\Users\julyfun> nvidia-smi-
[LDM] 非常好 stable diffusion: https://www.zhangzhenhu.com/aigc/%E7%A8%B3%E5%AE%9A%E6%89%A9%E6%95%A3%E6%A8%A1%E5%9E%8B.html
- 非常好的自注意力和多头注意力: https://www.cnblogs.com/lipu123/p/17717446.html
-
[DPM baseline]
- 数据集格式: zarr
-
[ARKit]
- ARKit 同时录制普通相机和超广角相机是不可能的: https://developer.apple.com/forums/thread/719837
-
[waveshare, arm, bug] I can open arm serial, but no response
- [maybe ok] Plug in type-c first, then charger
12.24
- dp 含代码:
https://blog.csdn.net/v_JULY_v/article/details/143651718
12.20
- 简单微调个 yolo11m-seg
1Could not load library libcudnn_cnn_train.so.8. Error: /usr/local/cuda/targets/x86_64-linux/lib/libcudnn_cnn_train.so.8: undefined symbol: _ZN5cudnn3cnn34layerNormFwd_execute_internal_implERKNS_7backend11VariantPackEP11CUstream_stRNS0_18LayerNormFwdParamsERKNS1_20NormForwardOperationEmb, version libcudnn_cnn_infer.so.8- 可能是 torch cu121 + nvcc 12.3 导致的问题
- [ok] 换为 torch cu118 + nvcc 11.8 解决. (可直接在该 conda 环境下 pip uninstall + install)
12.19
- diffusion & flow matching 几何理解: https://zhuanlan.zhihu.com/p/11228697012
12.18
- [ok] 上传 python package 到 pypi:
- setup 和文件结构查看
https://github.com/julyfun/fast_math
- setup 和文件结构查看
1python setup.py sdist bdist_wheel ...<your options>2twine upload --repository testpypi dist/* --verbose-
.
- install mac arm64 版本后报错 dlopen x64? 构建时不要用 conda 执行 setup.py,在 venv 或者系统环境下执行.
-
[arkit]
nano 12.19
- GLIBCXX 3.4.29 not found?
- [ok] strange way: https://blog.csdn.net/weixin_39379635/article/details/129159713
12.17
- Link opencv on macos shows
libavcodec<...>.dylibnot found- [ok] 这次因为手动编译的 opencv 和 brew opencv 同时存在,前者覆盖了后者 Config 导致的,用 install_manifests.txt 卸载手动编译的即可
- [err] pyudev 在 docker 中能发现 USB 但输出的 Info 都是 Unknown?
- [ok] use this: (ref: gpt)
- [bug] python3 setup.py install doesn’t compile pybind11 cpp
- [ok] clean
/build
- [ok] clean
1docker run -dit --privileged -h $(hostname) --net=host -v /dev:/dev -v /run/udev:/run/udev -v /sys/fs/cgroup:/sys/fs/cgroup \2-v /sys/class/tty:/sys/class/tty -v /sys/devices:/sys/devices \3-e DISPLAY=$DISPLAY -e XAUTHORITY=/tmp/xauth -v ~/.Xauthority:/tmp/xauth -v /tmp/.X11-unix:/tmp/.X11-unix \4-v ~/ws/docker2:/home wave-241215:latest12.14
- jetson nano ros2 tf2
- [err] fastapi 无法 lookup_transform?
- [ok] 注意初始化一个节点以后必须
rclpy.spin(that_node),不然无法获取资源.
- [ok] 注意初始化一个节点以后必须
- [err] fastapi 无法 lookup_transform?
- fastapi hydra 多线程踩坑
- 不要用 hydra main 模拟 class 的同时用多线程。如果 main() 创建的多个线程调用同一个 main() 中的数据,就会出
Local variable reference before assignment...
- 不要用 hydra main 模拟 class 的同时用多线程。如果 main() 创建的多个线程调用同一个 main() 中的数据,就会出
12.12
- https://github.com/xubiaolin/docker-zerotier-planet
- [err] Intel CPU mac 无法启动 zerotier
- [ok]
sudo launchctl load -w /Library/LaunchDaemons/com.zerotier.one.plist - ref: https://discuss.zerotier.com/t/error-waiting-for-zerotier-system-service-mac-m1/16554
- [ok]
- [err] Intel CPU mac 无法启动 zerotier
- [err] liaoyu 的 mac vscode 无法 ssh 连我 wsl
- [ok] add this to vscode settings.json
1 "remote.SSH.useLocalServer": false,2 "remote.SSH.useExecServer": false,- [docker, waveshare, github] see
24/11/...md - [docker, proxy]
Error response from daemon: Get "https://registry-1.docker.io/v2/": proxyconnect tcp: EOF- [ok] use
http://(nos) inhttps_proxy
- [ok] use
- wsl ssh 不稳定的话试试关了 win clash-verge 的 TUN 的系统代理
- jetson nano 20.04 install docker
- 今天用的 docker 镜像来自
https://www.cnblogs.com/cao-lei/p/14448052.html- 注意他给的 json 多了个
{} - docker 启动错误,则用
sudo dockerd --debug查看信息
- 注意他给的 json 多了个
- docker 不用镜像,配了 proxy (see:
https://docs.docker.com/engine/daemon/proxy/#httphttps-proxy) 并从 sic-guest 换 SJTU 快多了- [ok] 用了 ros humble jammy base 镜像
12.11
- 解决 teleop 开始 5s 后开始严重卡顿问题:
- nuc 的 Shadow project src 更换回老版本
- 60fps 插值,move_unsafe 函数的 time 设置为
1 / 120 - 之前发 arm wrist 的时候没有发 hand 的前两个关节.
12.9
-
?
- Central task execution?
-
how-to
- [bug, vscode, typst] tinymist 开着,但是没有预览图标
- 可能因为识别成 Django txt了
- [bug, vscode, typst] tinymist 开着,但是没有预览图标
12.6
- [wsl, zerotier, ssh] 如果 mac ping wsl 延迟很大,ssh 不上,检查 win 的 clash verge. 今天因为开了全局导致 ping time 350ms,web ui 也显示 300ms, 关了全局就 ok.
- shadow 计划:
- 将 hand fps 拉高,不然看起来很不平滑
- 记得更新 cpp & ringbuffer
- [pycocotool] 报错
1 cc1: fatal error: ../common/maskApi.c: No such file or directory2 compilation terminated.3 error: command '/usr/bin/gcc' failed with exit code 1- .
- try
conda install cythonpip install cython- [fail]
- try:
pip install ... --only-binary=:all:- [ok]
- try
- 给图为 jetson nano 刷机
- jetpack version is 5.1.1
- docker:
https://docs.docker.com/engine/install/ubuntu/ - 装 librealsense - ok (根据 git repo 的 markdown
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation_jetson.md) - pytorch 不要在 torch 官网下载,前往 https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048 下载 whell, pip 安装
- 🚫(已放弃) 非 conda,装 cp38 torch2.1.0 (见下方 ultralytics)
- 🚫 cuda 似乎这镜像不自带,try 官网下 local 11.8 (no .run for jetson)
- 应该装 cuda 11.4 因为 torch whl 用 11.4 预编译
- [ok] 使用
apt安装,见下 cudnn 的 csdn 链接
- cudnn: 必备. 用 apt 下载
https://blog.csdn.net/a111222zw/article/details/120632906- [ok]
import torchok
- [ok]
- 看 ultra 文档 https://docs.ultralytics.com/guides/nvidia-jetson/#install-ultralytics-package_1 貌似会少走很多弯路
- 后面完全按此文档执行
- torch 2.1.0 也按此文档.
torch.cuda不 available?pip3 install pycuda --user- ref: https://forums.developer.nvidia.com/t/my-jetson-nano-board-returns-false-to-torch-cuda-is-available-in-local-directory/182498/4
- [ok]
- [must] reopen shell after installing cuda or cudnn to continue some package building.
- [bug] When installing
pycuda,src/cpp/cuda.hpp:14:10: fatal error: cuda.h: No such file or directory- [?]
- [must] torchvision should be 0.15.0 (git checkout v0.15.0-rc8)
- [note] use ghproxy!
- [bug]
ImportError: libopenblas.so.0: cannot open shared object file: No such file or directory- [ok, must]
sudo apt-get install libopenblas-dev
- [ok, must]
- [BUG]
TypeError: canonicalize_version() got an unexpected keyword argument 'strip_trailing_zero'- [ok] fixed by
pip install -U packaging - ref
https://github.com/pypa/setuptools/issues/4483 - pip 有 ERROR 是正常的,往下装就行 (?)
- [ok] fixed by
- [bug] build from source and install,
import torchvisionversion 不变- [ok] 因为有多个 torchvision 被装在不同的 site-packages 下了,可以多次 pip uninstal 它们.
- [fail] run yolo model, 报错 torchvision 和 torch 不兼容
- switch torchvision version!
- [ok] 配置好可以 yolo 了
- cuda-11.4
- cudnn8 from apt (csdn link above)
- 全局 python 3.8
- torch from nvidia whl 2.1.0
- torchvision 0.15.0 build from source using cuda-11.4
git pushasks forhttps://github.comusername?- Check git remote -v, this should not be https but rather [email protected].
12.5
- jetson nano orin 20.04:
- Clash Verge: 使用
WEBKIT_DISABLE_COMPOSITING_MODE=1 clash-verge启动 clash verge- 记得安装 ..2gtk4.0-37
- [ok]
- Clash Verge: 使用
12.2
- [抵抗困倦] 玉兰苑鸡排铁板烧吃了 70% + 饭后散步 15min
- 昨日睡眠 7h
- 20min 后困的不行. 睡着了 1h
11.30
11.29
- GPIO 协议 8 模式图解: https://blog.csdn.net/weixin_45784125/article/details/139125987
11.28
11.27
- 这两天 lmz 的 AWS 一直没法 SSH 连,已配好 SSH 安全组,仍然报错
- kex_exchange_identification: Connection closed by remote host
- [success] 是 Clash 问题,AWS 和 aliyun 都会 ban vpn ip,所以直接开直连就连上了.
ImportError: /home/julyfun/miniconda3/envs/ml/lib/python3.9/site-packages/torch/lib/../../nvidia/cusparse/lib/libcusparse.so.12: undefined symbol: __nvJitLinkAddData_12_5, version libnvJitLink.so.12- 情况:torch 2.5.0+cu121,
import torch报错. - [success] /usr/local/cuda 指向了 12.3 报此错,改为 11.8 正常 import
- 情况:torch 2.5.0+cu121,
- Streaming-Grounded-SAM-2
- torch2.3.1+cu121
- nvcc 12.3
- triton error? ref: https://github.com/triton-lang/triton/issues/625
- just
pip uninstall tritonandpip install triton(wtf why ok?)
- just
python demo.py --model Qwen2-7B-Instruct-AWQ- [success]
- 👍 舵机原理: https://blog.csdn.net/weixin_38288325/article/details/132366604
- 机器人动力学:牛顿欧拉法,拉普拉斯方程
11.26
- 不错的自监督学习简介, 含损失函数: https://juejin.cn/post/7211053184731037754
11.24
11.25
11.24
- web typst: https://www.npmjs.com/package/@myriaddreamin/typst-ts-web-compiler
- [wsl, disk] 统计 wsl disk 占用:
sudo ncdu / --exclude /mnt(apt)
11.23
11.18
- NOIP 真题: https://github.com/winterant/oi
- 后验 ref: https://blog.csdn.net/qq_23947237/article/details/78265026
- 知目的地 15 公里,知小哥到达时间 20min,求小哥走路、骑车和开车的概率
- 开车概率比较大,由果反推因概率,这是后验概率,记为
- 先验
- 知小哥喜欢健身,求小哥走路、骑车和开车去公园的概率
- 走路概率比较大。由因推过,先验概率,记为
- 最大似然估计(ML,Maximum Likelihood)目标是找出一组参数 ,使得模型产生出观测数据 的概率最大:
- 看完 h2l 后看看 transformer 另一解析: https://jalammar.github.io/illustrated-transformer/
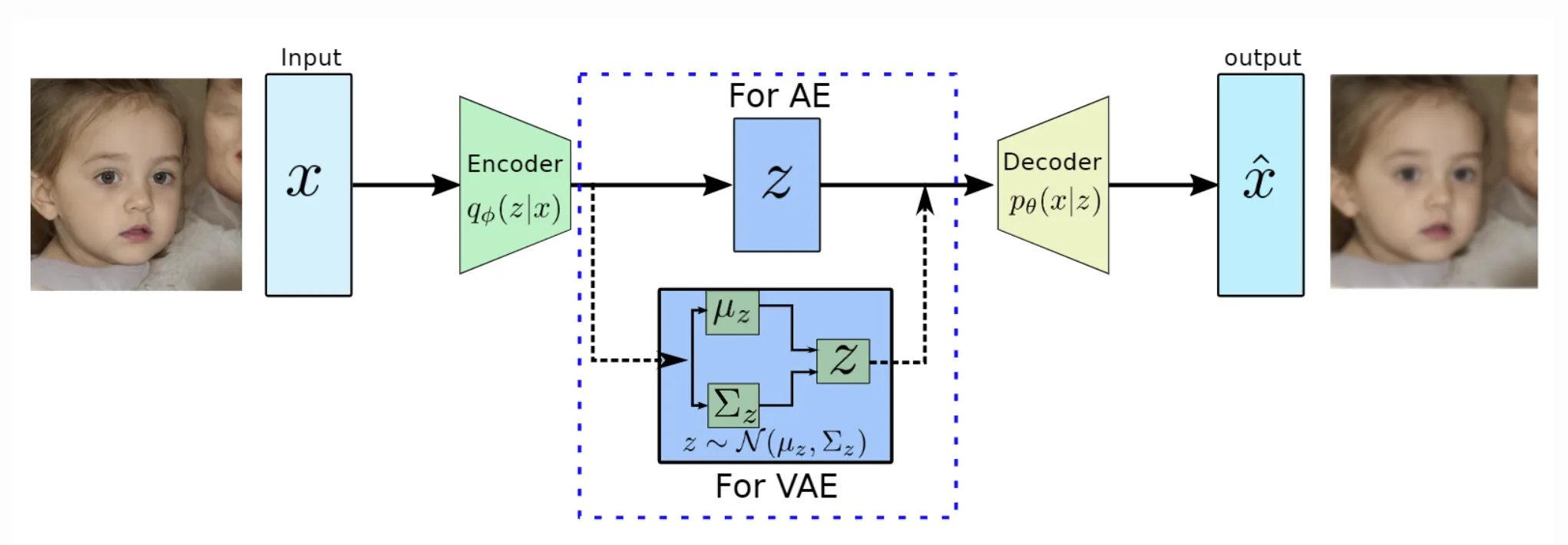
- speit ML AE & GAN:
- AE 就是自己学习降维,Encoder 输出位若干维度向量.
- VAE 的 Encoder 输出改为一个均值和一个标准差.
- win10 机房 FTP 配置: https://blog.csdn.net/2301_78216479/article/details/138161487
- [success]
11.17
- C++ easy debug extension: C/C++ Runner (click button debugging)
11.16
- wsl install font: https://blog.csdn.net/u010469411/article/details/130420529
- For my typst, download SongTi SC Regular & Bold & Black: https://en.maisfontes.com/font-family/download-songti-fonts?utm_source=search
11.15
- ssh win failed
- [done] clash verge 开了全局
11.13
-
C++ GUI with python - imgui: https://pyimgui.readthedocs.io/en/latest/guide/first-steps.html
-
Gaussian Splatting 数学原理: http://www.yindaheng98.top/%E5%9B%BE%E5%BD%A2%E5%AD%A6/3DGaussianSplatting.html#splatting
-
优化问题,RL 和 DL
- 优化问题: 知 F(x), 梯度下降求 x 最小化 F
- DL: 不知 F(x),知若干对 x, y,用各种权重层 w 拟合 F
- 一个 batch 内,固定 x,从而知 Loss,求 w(视为自变量)最小化 Loss,转变为优化问题
- RL: 这是一个多步问题
- 不知 V(s)
11.12
-
G-SAM-2. 目标:根据 TEXT_PROMPT 分割小熊虫
- Run
python grounded_sam2_local_demo.pyin dockerFailed to load custom C++ ops. Running on CPU mode Only!- Tried this:
- https://github.com/IDEA-Research/Grounded-Segment-Anything/issues/152
- 还是一样报错
- 后来我用了
python grounded_sam2_hf_model_demo.py,没去测local_demo,没报上述问题
1File "/home/appuser/Grounded-SAM-2/grounded_sam2_hf_model_demo.py", line 132, in <module>2detections = sv.Detections(3TypeError: Detections.__init__() got an unexpected keyword argument 'mask' - 重新
make run,可以通过视频识别基础测试 - [undone]
- Run
-
试图使用 G-SAM1
- 直接 make build-image,运行警告 CPU mode only
- 手动修改 Dockerfile, 依据
https://github.com/IDEA-Research/Grounded-Segment-Anything/issues/434 apt install处报错. [unnoted]- [undone]
- 手动修改 Dockerfile, 依据
- 试图不用 Docker (构建失败时间代价太大),用 conda
- 低级错误: 环境变量 CUDA_HOME
- [success] text prompt 输出分割图片成功!
- 直接 make build-image,运行警告 CPU mode only
-
下面安装命令行 colmap (wsl2, ubuntu22.04)
- 先 https://colmap.github.io/install.html#pre-built-binaries
- 我使用
cmake -DCMAKE_CUDA_ARCHITECTURES=89 .. make -j8sudo make install- [success]
- 我使用
- 先 https://colmap.github.io/install.html#pre-built-binaries
-
d2l.transformer
- 记得用 AI
11.9
- reluctant tasks: william 的备课.
- just ok
11.8
- typst OCR 试试这个: https://github.com/ParaN3xus/typress
11.6
- SuGAR:
- 生成 colmap 数据集
- 黑物体容易重构失败 (右下角 images 突然减为 0,发生间断)
- 物体偶尔露出屏幕外没事
- Dense 很慢,2h 的样子
- Install
- cuda 12.3 不行,见 readme
- 安装 gaussian 时还是报错
error: [Errno 2] No such file or directory: ':/usr/local/cuda/bin/nvcc'?- 因为
$CUDA_HOME环境变量多了个冒号. 去环境配置里把冒号删了就 ok- fish shell is ok
- [success]
- 因为
- 以以下文件结构成功开始 Train
- 生成 colmap 数据集
1dataset2├── database.db3├── images4│ ├── 5_0.jpg5│ ├── ...6│ ├── 5_98.jpg7│ └── 5_99.jpg8└── sparse9 └── 010 ├── cameras.bin11 ├── images.bin12 ├── points3D.bin13 ├── points3D.ply14 └── project.ini1- 报错没某某驱动,就 `conda install -c conda-forge libstdcxx-ng`2- Train 过程中报错没 ninja: 记得先装之3 - retrain 注意 python 参数加入 gaussian 模型 pt 位置 (see readme)4 - 再 retrain 可以修改 train.py 将 refined pt 模型载入之前全删了,保留 pt path5- 由于 wsl2, 修改 `sugar_utils/mesh_rasterization.py:102` 处 `dr.RasterizeGLContext()` 为 `dr.RasterizeGudaContext()`(根据 issue)6- [success]7 - 生成依托答辩的 mesh8 - !! 放到 meshlab 下居然非常 ok 的 mesh9- 另一天重做了一次,报错:1[WARNING] Background is empty.2Finished computing meshes.3Foreground mesh: None4Background mesh: None5
6-----Decimating and cleaning meshes-----7
8Processing decimation target: 2000009Cleaning mesh...10Traceback (most recent call last):11 File "/home/julyfun/Documents/GitHub/SuGaR/train.py", line 157, in <module>12 coarse_mesh_path = extract_mesh_from_coarse_sugar(coarse_mesh_args)[0]13 File "/home/julyfun/Documents/GitHub/SuGaR/sugar_extractors/coarse_mesh.py", line 478, in extract_mesh_from_coarse_sugar14 raise ValueError("Both foreground and background meshes are empty. Please provide a valid bounding box for the scene.")15ValueError: Both foreground and background meshes are empty. Please provide a valid bounding box for the scene.1 - 试试看 colmap 删除未提取的图片2 - 怀疑不能抠图3 - [undone]- Grounded-SAM 2 抠图
- 可以手动扣小熊虫 🆗
11.5
- cuda12.3 装 torch 确实只需要:
pip install torch==2.5.0 torchvision==0.20.0 torchaudio==2.5.0 --index-url https://download.pytorch.org/whl/cu121- https://pytorch.org/get-started/previous-versions/
11.2
10.31
-
生物对称机理:
-
某硕士地暖铺设: https://skemman.is/bitstream/1946/42094/1/masters-14.pdf
-
基础调参技巧 https://www.zhihu.com/question/25097993/answer/3410497378
10.30
- [薛寒, xuehan, 学长, 论文] https://github.com/xiaoxiaoxh/UniFolding
10.29
10.28
- 机器人会议: https://www.cnblogs.com/Gaowaly/p/18419856
- youtube 字幕下载: https://downsub.com/zh/site/youtube/
10.21
- 睡觉 3:10 - 7:50
10.20
- 睡觉 3:30 - 12:00
- http://moodle.speit.sjtu.edu.cn/pluginfile.php/46609/mod_resource/content/1/SJTU__2024_European_fiscal_policy.pdf
10.19
- 重配宿舍服务器内网穿透
- zzx?
- 使用 mfa 配穿透?省的额外交钱
- 这样就可以修好 how-to 网站了
- 微调小 LLM
- 睡眠 4:00 - 11:50, 午觉 2h+
- …
10.18
-
WOOCLAP.com 实时学生答题
-
8-10 在配 rustdesk p2p, 直接用 zerotier ok 但是非常慢
- 为什么不考虑向日葵呢(😁
-
10-11 做 ml tp 6
- 怎么花的有点久了
-
糟糕的睡眠似乎长久以来降低了我所有工作的效率!
-
睡眠 3:30 - 7:50
10.16
-
睡眠 4:30 - 7:40 wtf
-
看起来 wsl2 不支持 NUMA 从而无法使用 tensorflow gpu
10.15
-
report
- 遗传算法编码 fail - 代码
- kruskal 没有拓展性
-
约定加分项
-
18:40 实验室 +300
-
洗澡 +100
-
决策树回忆提纲: https://blog.caiyongji.com/2021/02/25/machine-learning-5.html
-
rustdesk p2p 打洞: https://luotianyi.vc/6542.html
10.14
10.13
- cget c++ 包管理: https://github.com/pfultz2/cget
10.11
- 支持向量入门: https://zhuanlan.zhihu.com/p/40857202
- 支持向量简单: https://cuijiahua.com/blog/2017/11/ml_8_svm_1.html
- 支持向量数学 https://www.math.pku.edu.cn/teachers/lidf/docs/Rbook/html/_Rbook/stat-learn-svm.html
- 简洁的支持向量: https://blog.csdn.net/chikily_yongfeng/article/details/105607154
10.9
- 尝试 mkdocs + wypst 但是发现不简单
- Did you work for…?
- 强化学习概述: https://daiwk.github.io/posts/rl-introduction.html
- Tauri APP: https://v1.tauri.app/zh-cn/v1/guides/getting-started/setup/next-js/
10.7
10.5
- 值得一做,遗传算法,OJ 算法题: https://www.cnblogs.com/Link-Cut-Y/p/17281139.html
- 奇怪的工程搜索网站: https://explorer.globe.engineer/
10.2
-
[robot, urdf] urdf 描述:
- link 和 joint 均为一个坐标系
- joint 有 parent link 和 child link,其 child link 坐标系与 joint 永远一致
- joint 发生运动时,其坐标系将发生运动,计算方式为:
<origin>描述了 joint 在原始状态下相对 parent link 坐标系的变换,与此同时通过<axis>+变量 q来决定额外发生的变换 <axis>形如<axis xyz="1 0 0" />,这里 xyz 是 joint 自己原始状态下的 xyz- 也就是说 joint 运动时相对上一个 joint 的变换会更新,但相对下一个 joint 的变换不会更新
-
四元数插值: 球面线性插值 or 线性插值(需归一化)
-
#def 四元数
1w = cos(theta/2)2x = ax * sin(theta/2)3y = ay * sin(theta/2)4z = az * sin(theta/2)5- 表示旋转轴单位向量 ax, ay, az,旋转角 theta6- 四元数多对一旋转:考虑反转旋转轴和旋转角10.1
- 李群李代数指数映射对数映射: https://blog.csdn.net/shao918516/article/details/116604377
- 大学各种微分方程: https://blog.csdn.net/qq_35357274/article/details/109935169
9.30
- shadow hand 手指关节定义 https://www.shadowrobot.com/wp-content/uploads/2022/03/shadow_dexterous_hand_e_technical_specification.pdf
nuc 网络修复日志
-
nmap -sn 10.9.11.0/24 -
昨天晚上开始彻底连不上 nuc 了
ssh: connect to host 10.9.11.2 port 22: No route to hostping 不通 -
换网线没用
-
换 nuc USB / 路由器网口,没用。经测试网口 + 网线 + 拓展坞配套能让 mac 接入局域网
-
nuc 接到 laptop 工位这里的网线和拖线板上,居然可连了
-
用 nuc 桌面取消了自动连接的 Wifi
-
插回工作台拖线板,又不可连了
-
又接到 laptop 工位上,又可连了
-
怀疑拖线板插座质量问题,接回工作台拖线板,从第三个插座换第五个,居然可连了
-
从第五个插座换回第三个,居然依然可连
- 也就是说所有配置和昨晚不变(除了 Wifi),换来换去就可连了
-
过了十分钟又坏了
-
换到第五插座又好了,希望这次稳定点
9.29
-
睡眠 2:30 - 8:45 | -150
-
中心任务打断:
- 下去看参观交龙的人
-
工作上课迟到 -600
-
80min 内链路层 160
-
准备计网 TP 60
-
60min 内实习报告 +240
- 实际上花了 3h 多
-
CCF 会议期刊分类 https://ccf.atom.im/
9.28
- easymotion
9.27
- 配置 wsl 内网穿透 👌🏻 以下 ok
- https://blog.csdn.net/weixin_43224069/article/details/130619170
- https://blog.csdn.net/weixin_43224069/article/details/130621752
- 坑点:
- 注意 vscode remote-ssh 连接时需要特殊配置,见文章
kex - 不开 Clash Verge TUN + 服务模式会龟速,开了 TUN 如果不直连的话,可能会访问不了阿里云服务器
- 注意 vscode remote-ssh 连接时需要特殊配置,见文章
- wsl 配 cuda, 没错 wsl2 下需要又配一次: https://blog.csdn.net/VVBBBBB/article/details/134129558
- 我按照另一教程多版本 cuda + cudnn 安装成功: https://blog.csdn.net/tianzhenba/article/details/137403606
- 除了 cudnn 的 cp 命令文件夹名需要调整以外,都 ok. I use:
- 我按照另一教程多版本 cuda + cudnn 安装成功: https://blog.csdn.net/tianzhenba/article/details/137403606
1sudo cp lib/libcudnn* /usr/local/cuda-12.4/lib64/2sudo cp include/cudnn.h /usr/local/cuda-12.4/include9.26
-
睡眠 3:30 - 8:30 + 11:30 - 15:00 | -210 - 210
-
中心任务打断
-
FASTAPI: https://www.runoob.com/fastapi/fastapi-request-response.html +50
-
10.2 +150
-
1.2 +150
-
计网链路层 +150
-
大拇指 ik +200
- 首先看清楚 quest3 旋转轴
-
Cookie 的具体属性: https://developer.mozilla.org/zh-CN/docs/Web/HTTP/Cookies
-
生成对抗网络的损失定义: https://blog.csdn.net/DFCED/article/details/105175097
9.25
- 睡眠 1:30 - 8:30
- 中心任务打断
- .
- 大拇指 ik: 主要是之前仓库的接口比较抽象 +200
- ruckig?
- opentv 优化库
- 8 自由度 ik
- 准备英语自我介绍 +100
9.23
-
睡眠 7:15 ~ 11:50
- 中心任务打断
-
3d 重建: https://github.com/graphdeco-inria/gaussian-splatting
9.20
-
睡眠 5 ~ 11:30
-
中心任务打断
- 光纤百科
-
计网 下一章
9.19
装了电脑
9.18
- 中心任务打断
- 新闻
- 修复 mac vscode bug
9.15
- 中心任务打断
- jst.fish
9.14
-
中心任务打断:
- github.com
- jst.fish++
-
rviz show obj +300
- stl -> urdf -> RobotModel component
-
臂力器购买
9.12
- typst FAQ 中文: https://typst-doc-cn.github.io/guide/FAQ.html
- 旋转广义插值: https://zhuanlan.zhihu.com/p/88780398
9.11
- 深度学习名词扫盲: https://blog.csdn.net/qq_18555105/article/details/121345833
- 数据集如何放置: https://blog.csdn.net/weixin_61961691/article/details/139436386
9.9
markdown 转微信公众号文章 https://md.qikqiak.com/
9.2 周一计划
-
exe-total: -200 - 280 = -480
-
中心任务打断:
- how-to 分布式仓库 ++
- linux zed
- jst.fish
- jst.fish
- 搓背
- jst.fish
-
录制 optitrack +200
8.25 周日计划
- 考察大零号湾集训场地,尝试 ipad / mac 投屏
8.24 周六计划
-
exe-total: 0
-
中心任务打断
-
jfmfoi 打印初赛练习题 +50
-
14:00 - 17:00 优雅地上课 +200
8.23 计划
-
exe-total: 0
-
中心任务打断
- 其他
- 中午迟到 10min ++
- 水群
- 清理磁盘
-
jfmf 详细表 +50 early++
-
完善 aubo readme +100
-
jfmfoi + william 备课 +150
-
准备实习报告图片视频材料 +50
-
碰撞调用 plan() 尝试 +100
-
校方实习评价表 +100
-
离职手续 +50
-
安排杭州旅游 +100
-
给学生买书?
others
- AnyTeleop、Open-TeleVision、Bunny-VisionPro——从RGB相机到VR远程控制机器人: https://blog.csdn.net/v_JULY_v/article/details/140384810
8.22 计划
-
exe-total: 250 - 600 - 210 = -560
-
中心任务打断
- 写完安排困倦疲惫睡觉 +++
- steam
- zhihu
- qq music
-
备课 jfmfoi 和 william: +100
-
jfmfoi 理解初赛答题 +100
-
今天得会默写 transformer 了吧 +400
-
jfmfoi 询问是否可集训 +50
-
jfmfoi 集训安排详表 +200
其他
8.21 计划
-
exe-total: 450 - 280 - 600 + 100 = -330
-
中心任务打断
- zhihu rust lifetime ++
- zed preview
- 黑吗喽新闻
- jst upa
- 飞书文档
- 知乎
- wishlist -280
-
200min 滤波 +400
-
jfmfoi 后期规划 +50
-
会写 transformer +300
-
rl 第二章 +100
-
备课 jfmfoi 和 william: +100
-
jfmfoi 理解初赛答题 +100
-
问问 jfmfoi 啥时候开学,是否可暑假集训 +50
-
获得上级学长下学期课表 +50
others
8.20 计划
-
exe-total: 600 - 150 - 360 = 90
-
中心任务打断
- 维基 苏林
- 搜索游戏 CG
- 公众号推文
- 获取一篇论文的引用数: 上 https://www.webofscience.com/wos/alldb/basic-search 就可以搜到,而且还有引用的文章列表
- typst 论文模板 https://github.com/hitszosa/universal-hit-thesis
- 搬迁 notes 部分笔记
- 存论文
- xy 聊天黑吗喽
- 回头写 win ninja how-to
- toml 语法
- 灵巧手腱绳驱动
- fft 回忆笔记
- -360
-
平滑优化 fast_control +400
-
matplot 3d 轨迹 +100
-
和周工聊聊 next step +100
-
和 yzy 聊聊 RL 之复现 +200 - half
-
和学弟聊聊实验室怎么样了 +100 - half
-
问问上级学长下学期课表 +50
-
催各个小朋友做作业 +100
others
- 机械手消抖论文 2019: 主从式手术机器人主手消抖方法 https://www.webofscience.com/wos/alldb/full-record/CSCD:6505295
8.19
-
exe-total: -50
-
中心任务打断
- github 编辑
- notion
- jst.fish
- fishshell
-
计网第一章 +50
-
30min 内双向循环神经网络 +50 failed
-
香橙派尝试装机至少 30min +50 failed
-
30min 内强化学习第一章 +100
notes:
- LLaMA 训练细节以及 LLaMA 模型 https://github.com/ymcui/Chinese-LLaMA-Alpaca/wiki/%E8%AE%AD%E7%BB%83%E7%BB%86%E8%8A%82
- 模型显存计算 https://www.cnblogs.com/pam-sh/p/18259728
- 7B fp16 推理显存 16 - 20GB, 使用 AdamW fp16/bf16 训练需要 55-60GB 显存
- 推理 2-3X,训练 8-10X
- 训练时 model weight = 2X (因为 2bytes) , gradient 2X,优化器 8X
- 微调时 model weight = 2X,Adaptor weight 可选 2.5% 比例则为 0.05X,gradient 和 optimizer states 共 0.25X
8.18
维尼新做了 aubo program update 解决了透传延迟的问题,现在居然稳定 8ms 延迟了,遥操作又快了。
8.15
双 tracker 适配也做好了,开摆!
notion or not
-
no:
- 可渲染 typst math 的前端
- notion 网络不好
- 不好被搜索
- 不好迁移发布到知乎等
-
yes:
- 显示图片方便
- 不用手动同步
- 可视化编辑
- 方便多端编辑
- 很好的 AI 集成
8.14
- tcp 图解: https://www.cnblogs.com/jojop/p/14111160.html
- web 多人联机卡牌,是时候启动虫虫了: https://github.com/igorsheg/set-up
8.5
- 写一个自动化美工工具,用 segment-anything 把上传的图片分割出来并像素化,附加调亮度和手动调整像素格功能。输入:上传图片 + 物品名称。输出:像素化,背景透明的物品图片。
8.3
https://products.codeporting.app/zh/convert/ai/cpp-to-python/
8.2
…
1* (HEAD -> main, origin/main, origin/HEAD) readme 24-08-02 13:01 5259837 Julyfun MacOS14.5 M12* init bug 24-08-02 13:01 c0e2adc Julyfun MacOS14.5 M13* readme 24-08-02 13:01 9b9e6fa Julyfun MacOS14.5 M14* correct jst-mfa command usage 24-08-02 12:12 3417259 Julyfun MacOS14.5 M15* 用 return 代替部分 return 0 以返回上一命令是否成.. 24-08-02 12:12 e624d2f Julyfun MacOS14.5 M16* 结构更新,采用 XDG 范式;新增 usage-count 24-08-02 12:12 0fb8d2e Julyfun MacOS14.5 M1下午班
难崩。
晚上班
- 如果当前这个 publish traj 的方案行不通,再用这个试试: https://www.perplexity.ai/search/xiang-moveit-group1-joint-traj-6qX9SW4pTVikXsLrVYpzng#0
其他
- Linux 基本目录规范 ——XDG 介绍: https://winddoing.github.io/post/ef694e1f.html
8.1
摸鱼中,有空想给 how-to 写个 ai.
add this to roadmap
- astro 前端入门: https://www.cnblogs.com/chuckQu/p/17413402.html 这是拷贝外网文章,然而外网原文居然代码块元素挂了
7.31
睡眠
昨晚修服务器 + 娱乐,最后睡了 6.5h 左右。什么时候集成小米手环 api 直接统计我睡眠数据啊。
今天一定要打开生产力模式!
上午班
结果上午班又新闻 + 博客玩了一会儿。
最后时间刷了会 Typst 和 Latex 的旧闻。
下午班
先看了下 zig 增量编译咋样了,没查到,根据论坛找到了 rustc 的增量编译相关:
https://rustc-dev-guide.rust-lang.org/queries/incremental-compilation.html#the-basic-algorithm
也不知道增量编译会不会在 link time 增量呢,没写过编译器不懂。
- 梯度下降轨迹规划速览: https://www.cnblogs.com/ironstark/p/5544164.html
- mediapipe 手部姿态识别官网 demo: https://mediapipe-studio.webapps.google.com/demo/hand_landmarker?hl=zh-cn
- 人手为何 27 自由度: https://www.zhihu.com/question/21710229 其实我只是想获取手心姿态
- 获取 2.5D 手部姿态论文介绍: https://juejin.cn/post/7268955025211424779 终于在看新玩意了
- 2017 年 rgb => hand3d https://github.com/lmb-freiburg/hand3d
- Open-Television 新出的低延迟遥操作,带 ik smooth 算法: https://arxiv.org/pdf/2407.01512
- 其中提到 dex-retargeting,将人手关键点转换为关节角度 本质上和逆解类似,in: 手指位置 method: 优化问题最小化机械手关节位置和手指关节位置差 out: 关节角度
- 提到向量优化用的是 Sequential Least-Squares Quadratic Programming (SLSQP) algorithm [29 ] as implemented in NLopt
晚上班
继续看论文尤其是 ik smooth 那篇,但是效率不是很高,环境太吵了~
晚上
整理宿舍,被 🐷 遇到虫折腾。
其他不错的玩意
- SSD 系列目标检测介绍: https://blog.csdn.net/qq_27825451/article/details/89137697
- typst paper 官网模板: https://typst.app/universe/search/?kind=templates&q=paper 目前似乎没有跨栏图片的解决方法
- 变换矩阵与 SE3 关系说明: https://blog.csdn.net/weixin_36965307/article/details/123546945
7.30
睡眠
睡太早,半夜醒来刷了会手机更睡不着。最后加起来睡了 5.5h 的样子
有诗云:
想得太多,睡得太早
床板梆硬,床位短小
天气燥热,蚊虫叮咬
下午瑞幸,晚上醒脑
失眠焦虑,恶性循环
欲挑毛病,何患无辞
上午
为了新增 how-to 文章,一直在写 jst.fish
下午
找实时机械臂 tracking 论文。
晚上
先刷了会米国总统新闻和维基,又在配博客自动脚本之类的。
回家
折腾了海岛奇兵,发现服务器 clash 挂了没法自动更新博客,后来发现 TCP 端口被攻击,详见修复日志。
典型 tag
- to-try, todo, update, trying
- ok, real-machine-verified, unsure, just-for-me
- works-for-me, who-did-the-job
- ref, told
- rec(add to recommend list)
- num(used later)