8 DQN 改进算法
Double DQN
- 上一章的 DQN 在计算 $y^"real"$ 时,使用的是:
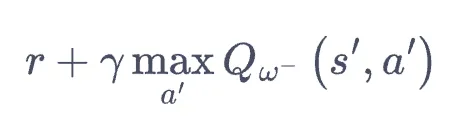

- 如 $w^-$ 有正向误差估计,则 $Q(s, a)$ 会被过高估计,而拿 $Q(s, a)$ 更新上一步 $Q$ 时,误差会逐渐累积。
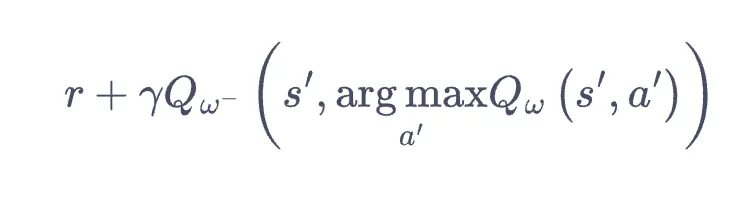
- 如何解决?将优化目标改为下式,也就是选取下一步最优动作时使用训练网络而不是目标网络. 这样可以缓解此问题.
Double DQN 代码区别
if self.dqn_type == 'DoubleDQN': # DQN与Double DQN的区别
max_action = self.q_net(next_states).max(1)[1].view(-1, 1)
max_next_q_values = self.target_q_net(next_states).gather(1, max_action)
else: # DQN的情况
max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1)
结果可视化
打印了两个图.
- 打印每个 episode 的回报移动平均
- 对每个时间步,记录该 episode (模拟采样周期)内的移动最大值,这是用于观察是否有 $Q$ 超限的情况
while not done: # 每个模拟时间步
action = agent.take_action(state)
max_q_value = agent.max_q_value(
state) * 0.005 + max_q_value * 0.995 # 平滑处理
max_q_value_list.append(max_q_value) # 保存每个状态的最大Q值
Dueling DQN

- 这里 $eta, alpha, beta$ 都是网络参数的意思。
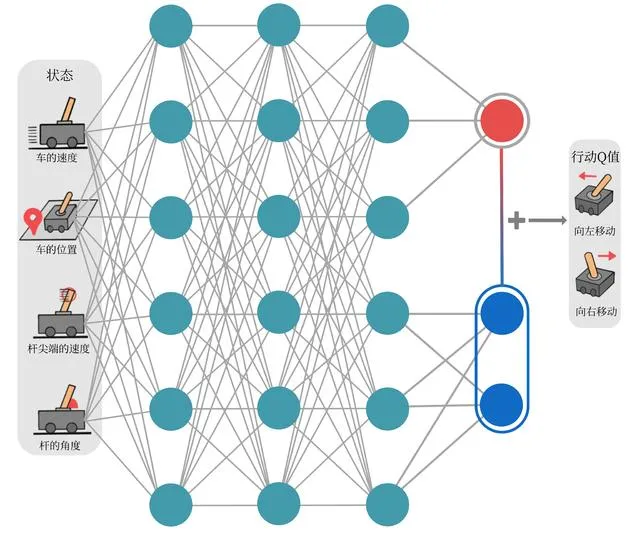
- $V$ 为状态价值函数,$A$ 为优势函数,数学上定义为 $A(s, a) = Q(s, a) - V(s)$.
- 注意训练数据依然是 $(s, a, r, s^prime)$ 的批量采样.
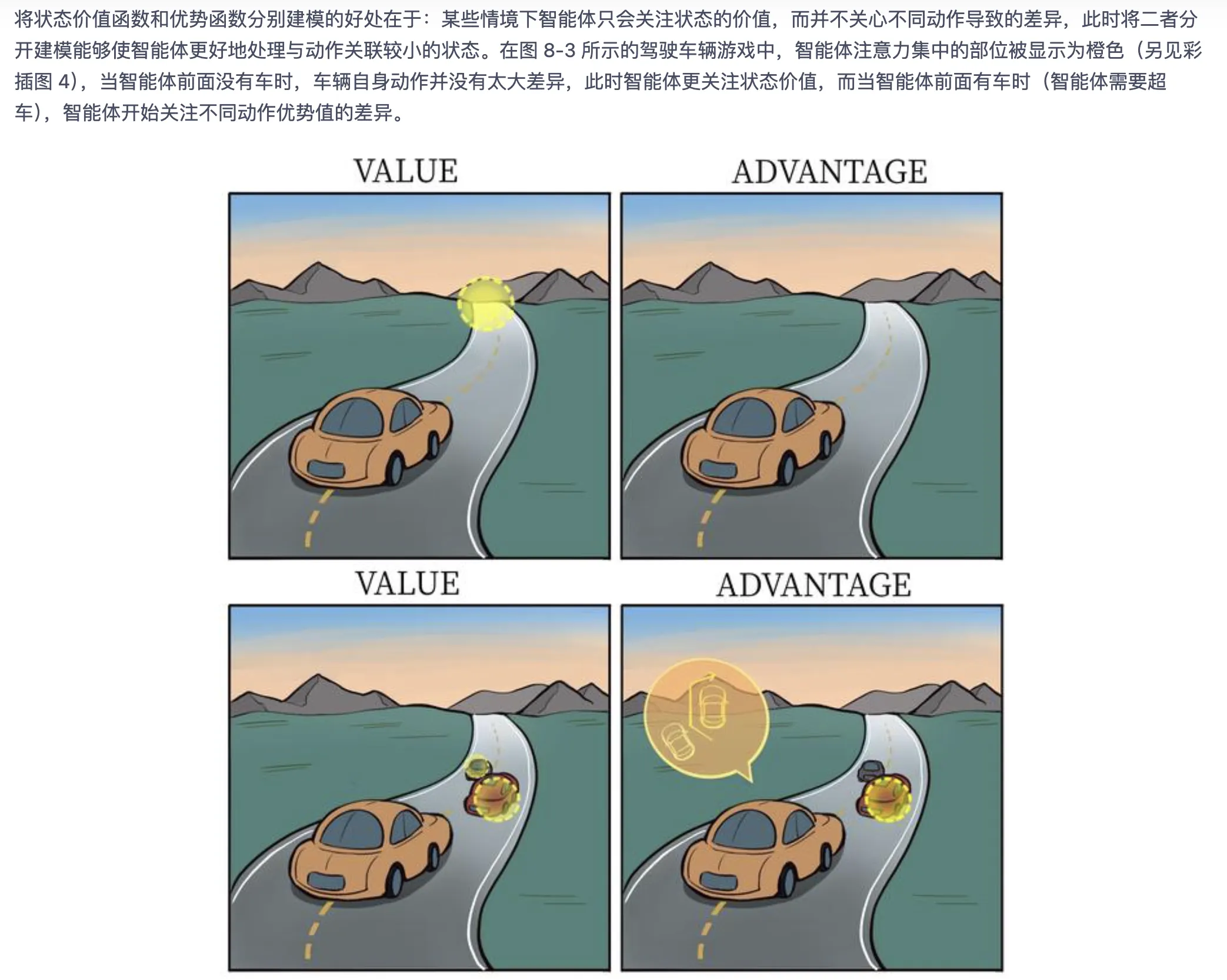
- 好处:某些情况下动作对价值影响不大。如果分开建模,训练这些情况时注意力会集中在 $V$ 网络上.
不唯一性问题
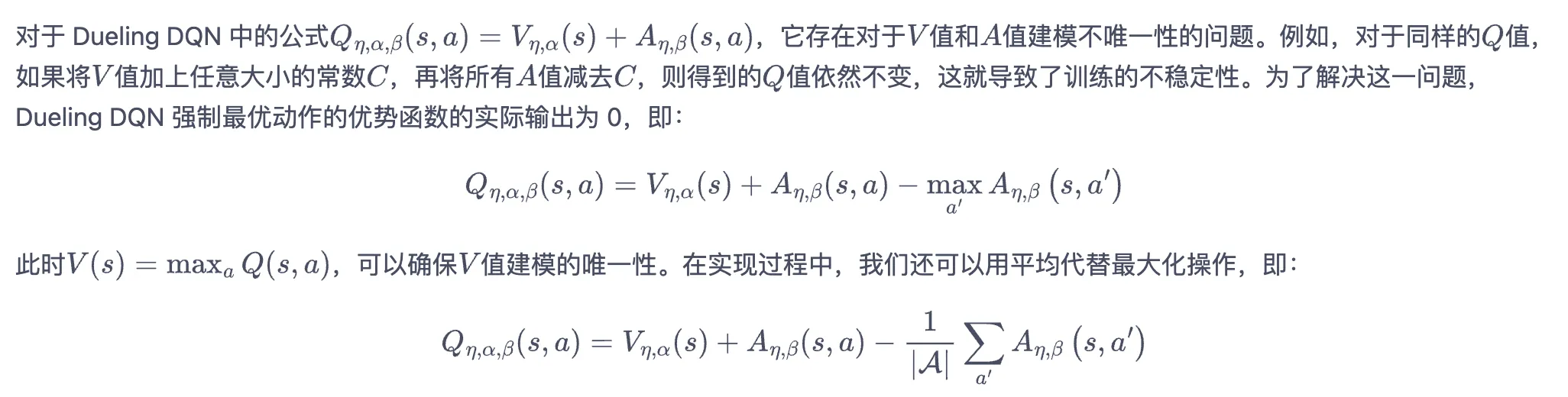
- 平均化操作更稳定,训练时采用之.
代码
- 基本上与 DQN 的区别只有下述代码:
class VAnet(torch.nn.Module):
''' 只有一层隐藏层的A网络和V网络 '''
def __init__(self, state_dim, hidden_dim, action_dim):
super(VAnet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim) # 共享网络部分
self.fc_A = torch.nn.Linear(hidden_dim, action_dim)
self.fc_V = torch.nn.Linear(hidden_dim, 1)
def forward(self, x):
A = self.fc_A(F.relu(self.fc1(x)))
V = self.fc_V(F.relu(self.fc1(x)))
Q = V + A - A.mean(1).view(-1, 1) # Q值由V值和A值计算得到
return Q
- 效果 : 学习更加稳定(回报曲线),得到回报的最大值也更优秀.
DQN 对 Q 值过高估计的定量分析
- 利用简单的累积分布函数知识(初中数学知识),如果 Q-net 的 $m$ 个动作的预测值会随机偏大偏小,则预测值的最大值的期望会比真实值最大值大.
- 当神经网络的预测方差与动作优势值达到同量级时,会非常严重.