7 DQN
- DQN 作用:对于连续的状态和离散的动作,可通过采样方式更新神经网络
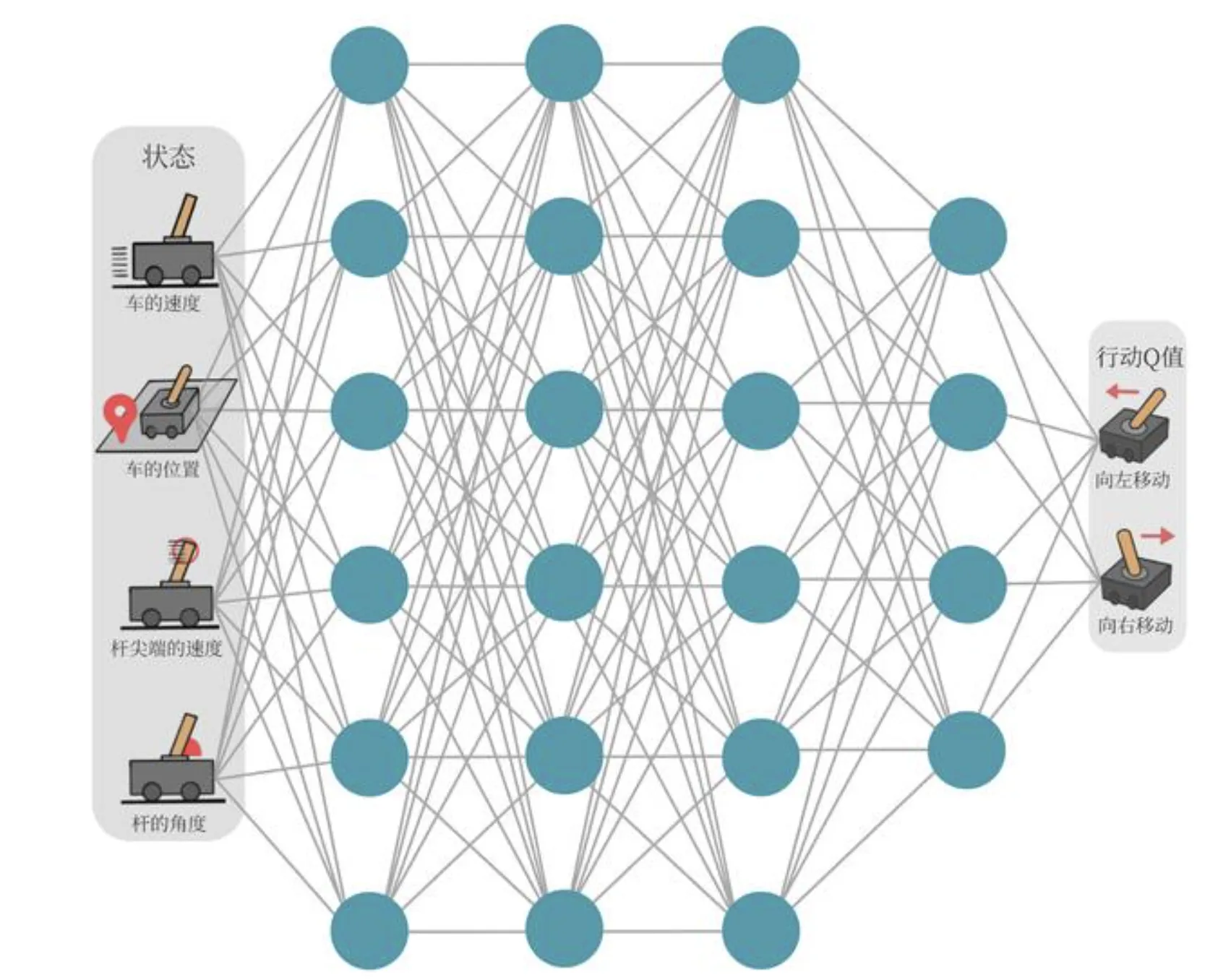
- Input: 可微状态(并不含动作)
- Output: 离散动作的动作价值
- 这就是学了个 $Q$,有了 $Q$ 策略就是选最大价值动作。
- 本章训练环境为小车上平面倒立摆的控制,奖励函数: 坚持 1 帧获得奖励 1,倾斜度数或者偏离程度过大或坚持 200 帧则结束。
损失设计
- 由于 Q-learning 是这样的:

- 所以对于一个批量的采样 ${(s_i, a_i, r_i, s_i^prime)}$,可以这样设计损失函数:
- 注意下面损失函数里有 $Q$ 本身,无法方便求损失,所以后面设计了双网络(训练网络和目标网络)。这里 $w$ 是 MLP 权重。

- 损失函数为 $0$ 时,再训练时满足: 动作奖励函数 = 该动作奖励 + $gamma times$ (状态随机采样,动作最优)后续状态下最优动作奖励函数
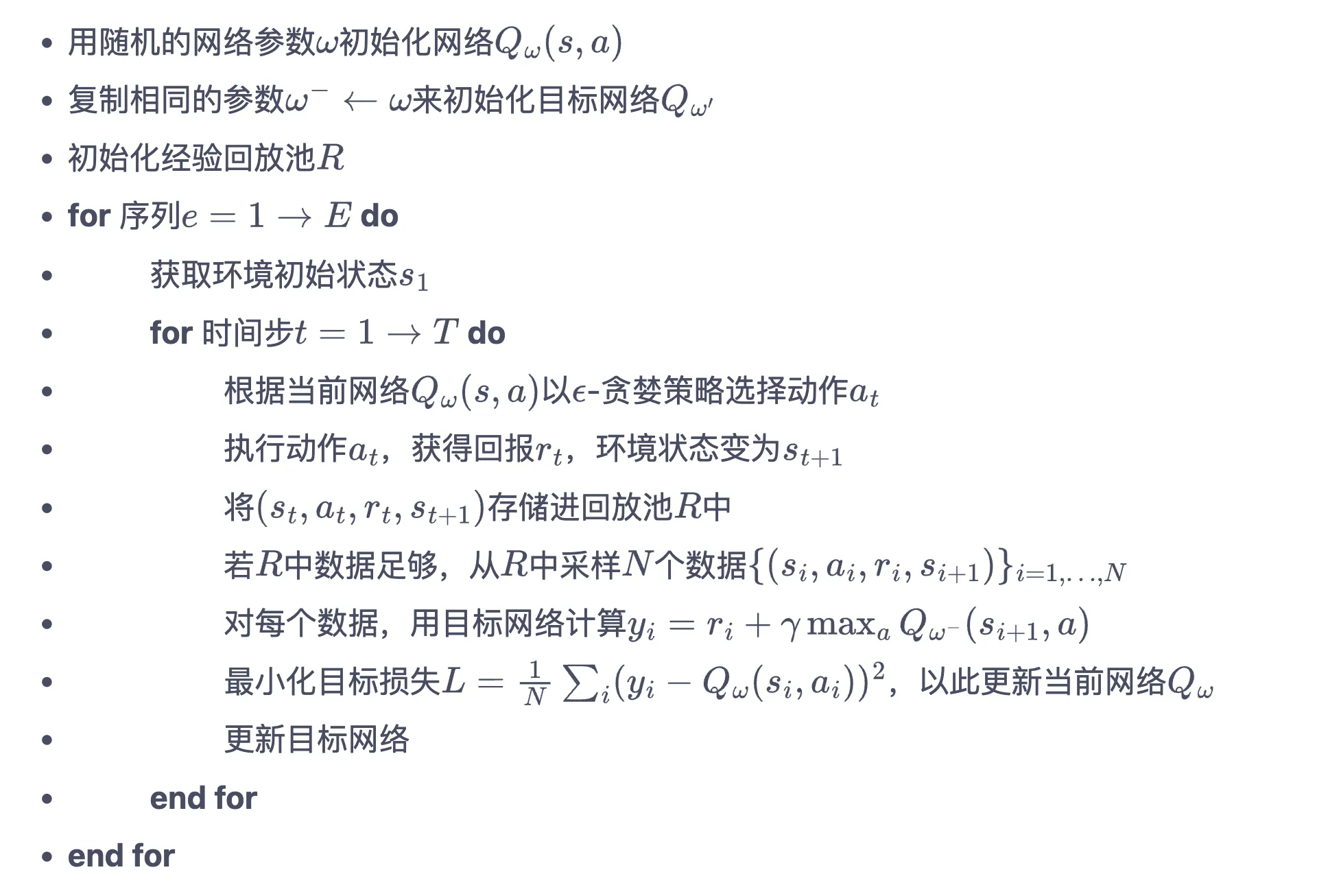
训练细节: 经验回放 experience replay
- 将历次采样放入缓冲区,取缓冲区的若干次数据(而不是最近一次)作为一个小批量来优化 $Q_w$
- 整个训练过程中,
replay_buffer不重置,每次训练拿出的数据大小为batch_size
目标网络 + 训练网络
其实就是复制两份网络,训练网络每次批量优化时都会更新(目标网络暂不更新),其中损失函数使用目标网络计算,每隔 $C$ 步将目标网络同步到训练网络。注意神经网络形式化的损失函数总是 $sum (F(x_i) - y_i^"real")^2$,在下方原文中可以见到。
- $w^-$ : 目标网络的权重
# 常规 Q-learning
...
action = agent.take_action(state)
next_state, reward, done = env.step(action)
agent.update(state, action, reward, next_state)
state = next_state
class ...:
def update(self, s0, a0, r, s1):
td_error = r + self.gamma * self.Q_table[s1].max(
) - self.Q_table[s0, a0]
self.Q_table[s0, a0] += self.alpha * td_error
# DQN
class Qnet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(Qnet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return self.fc2(x)
class ...:
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'],
dtype=torch.float).to(self.device)
actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(
self.device)
rewards = torch.tensor(transition_dict['rewards'],
dtype=torch.float).view(-1, 1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'],
dtype=torch.float).to(self.device)
# dones[i]: 第 i 个状态是否为终止状态
dones = torch.tensor(transition_dict['dones'],
dtype=torch.float).view(-1, 1).to(self.device)
# q_values: 训练网络给出的 Q值, 作为 y^hat,上面存了梯度
# `gather`函数用于从输出中选择特定的Q值。`1`表示在第二个维度(动作维度)进行选择,`actions`是动作的索引
# [q] gather 也能存梯度么?
q_values = self.q_net(states).gather(1, actions)
# 下个状态的最大Q值,目标网络给出,这是 y^real 的一部分
max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1)
q_targets = rewards + self.gamma * max_next_q_values * (1 - dones) # 终止状态不考虑下步奖励
dqn_loss = torch.mean(F.mse_loss(q_values, q_targets)) # 均方误差损失函数
self.optimizer.zero_grad() # PyTorch中默认梯度会累积,这里需要显式将梯度置为0
dqn_loss.backward() # 反向传播更新参数
self.optimizer.step()
if self.count % self.target_update == 0:
self.target_q_net.load_state_dict(
self.q_net.state_dict()) # 更新目标网络
self.count += 1
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
replay_buffer.add(state, action, reward, next_state, done)
state = next_state
# 当buffer数据的数量超过一定值后,才进行Q网络训练
if replay_buffer.size() > minimal_size:
b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)
transition_dict = {
'states': b_s,
'actions': b_a,
'next_states': b_ns,
'rewards': b_r,
'dones': b_d
}
agent.update(transition_dict)
最后输出
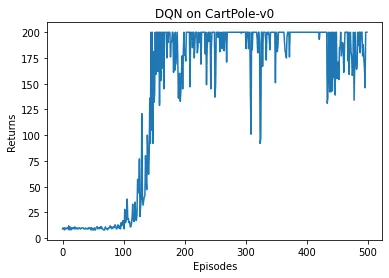
这里输出的每一个值是单个 episode 重置环境后的若干步采样的平均 return。相当于把机器人放到现实环境里去跑了几秒钟。
done.